![]() DP5
Programmer’s Guide Rev A76
DP5
Programmer’s Guide Rev A76
![]() DP5
Programmer’s Guide Rev A76
DP5
Programmer’s Guide Rev A76
DP5 Programmer’s Guide
Amptek Inc.
14 Deangelo Drive, Bedford, MA 01730
PH: +1 781 275 2242 FAX: +1 781 275 3470
[email protected] www.amptek.com
Note: This document applies to the Amptek DP5, PX5, DP5G, and products derived from these (X123SDD, Gamma-Rad5).
Table of Contents
DP5 Programmer’s Guide 1
1.1 Programmer’s Guide Rev A7 (this document) 5
1.2 Programmer’s Guide Rev A6 (this document) 5
1.3 Programmer’s Guide Rev A5 5
1.4 Programmer’s Guide Rev A4 6
2.1 Uploading the new firmware FW 6.06 (and FP5.11) 8
2.2 Installing and running the VB Demo 9
3.1.1 Installing the WinUSB Driver 10
3.2.4 Netfinder UDP port 3040 12
3.4 Transfer times and data buffering deadtime 15
4.1 Request Packets (Host PC to DP5) 17
4.1.1 Request packet: “Request Status Packet” 18
4.1.2 Spectrum Request Packets 20
4.1.3 Request packet: “Request Digital Scope Data” 21
4.1.4 Request packet: “Request Digital Scope Data & Re-arm Scope” 21
4.1.5 Request packet: “Request Misc Data” 22
4.1.6 Request packet: “Request Ethernet Settings” 23
4.1.7 Request packet: “Request Diagnostic Data” 24
4.1.8 Request packet: “Request Netfinder Packet” 25
4.1.9 Request packet: “I2C Transfer” 26
4.1.10 Request packet: “Request List-Mode Data” 27
4.1.11 Request packet: “Request Option PA calibration data” [MCA8000D only] 28
4.1.12 Request packet: “Request 32-bit SCA Counters” 29
4.1.13 Request packet: “Latch + Request 32-bit SCA Counters” 29
4.1.14 Request packet: “Latch + Clear + Request 32-bit SCA Counters” 29
4.1.15 Request packet: “Text Configuration” 30
4.1.16 Request packet: “Text Configuration Readback” 31
4.1.17 Request packet: “Clear Spectrum” 32
4.1.18 Request packet: “Enable MCA/MCS” 33
4.1.19 Request packet: “Disable MCA/MCS” 34
4.1.20 Request packet: “Arm Digital Scope” 35
4.1.21 Request packet: “Autoset Input Offset” 36
4.1.22 Request packet: “Autoset Fast Threshold” 37
4.1.23 Request packet: “Write IO3-0” 38
4.1.24 Request packet: “Write 512-byte Misc Data” 39
4.1.25 Request packet: “Set DCAL” 40
4.1.26 Request packet: “Set PZ Correction” 41
4.1.27 Request packet: “Set uC Temperature Calibration” 42
4.1.28 Request packet: “Set ADC Calibration” 43
4.1.29 Request packet: “Clear G.P. Counter” 44
4.1.30 Request packet: “Set Ethernet Settings” 45
4.1.31 Request packet: “Select High-Pass Time Constant” 46
4.1.32 Request packet: “Select RS232 Baud Rate” 47
4.1.33 Request packet: “Set HV Calibration” 48
4.1.34 Request packet: “Set 1.6uS PZ Correction” [PX5 only] 49
4.1.35 Request packet: “Clear/Sync List-mode timer” 50
4.1.36 Request packet: “Interface Keep-alive – Allow Sharing” 51
4.1.37 Request packet: “Interface Keep-alive – No Sharing” 52
4.1.38 Request packet: “Interface Keep-alive – Lock” 53
4.1.39 Request packet: “Comm test - Request ACK packet” 54
4.1.40 Request packet: “Comm test - Echo packet” 55
4.2.1 Response packet: “Status Packet” 57
4.2.2 Response packet: “256-channel spectrum” 61
4.2.3 Response packet: “256-channel spectrum plus Status” 61
4.2.4 Response packet: “512-channel spectrum” 61
4.2.5 Response packet: “512-channel spectrum plus Status” 61
4.2.6 Response packet: “1024-channel spectrum” 61
4.2.7 Response packet: “1024-channel spectrum plus Status” 61
4.2.8 Response packet: “2048-channel spectrum” 61
4.2.9 Response packet: “2048-channel spectrum plus Status” 61
4.2.10 Response packet: “4096-channel spectrum” 62
4.2.11 Response packet: “4096-channel spectrum plus Status” 62
4.2.12 Response packet: “8192-channel spectrum” 62
4.2.13 Response packet: “8192-channel spectrum plus Status” 62
4.2.14 Response packet: “2048-byte Scope Packet” 63
4.2.15 Response packet: “2048-byte Scope Packet w/ Overflow” 63
4.2.16 Response packet: “512-byte Misc Data Packet” 64
4.2.17 Response packet: “Ethernet Settings” 65
4.2.18 Response packet: “Diagnostic Data” 66
4.2.19 Response packet: “Configuration Readback” 70
4.2.20 Response packet: “Netfinder Packet” 71
4.2.21 Response packet: “I2C Read Data” 72
4.2.22
Response packet: “List-mode data”
Response packet:
“List-mode data, FIFO full”
73
4.2.23 Response packet: “MCA8000D Calibration Packet” [MCA8000D only] 76
4.2.24 Response packet: “64-byte SCA Packet” 77
4.2.25 Response packet: “Comm test - Echo packet” 78
4.3.1 Acknowledge packet: “OK” 79
4.3.2 Acknowledge packet: “OK, with Interface Sharing Request” 79
4.3.3 Acknowledge packet: “Sync Error” 80
4.3.4 Acknowledge packet: “PID Error” 80
4.3.5 Acknowledge packet: “LEN Error” 80
4.3.6 Acknowledge packet: “Checksum Error” 80
4.3.7 Acknowledge packet: “Bad Parameter” 80
4.3.8 Acknowledge packet: “Unrecognized Command” 81
4.3.9 Acknowledge packet: “PC5 Not Present” 81
4.3.10 Acknowledge packet: “Bad Hex Record” 81
4.3.11 Acknowledge packet: “FPGA Error” 81
4.3.12 Acknowledge packet: “CP2201 Not Found” 83
4.3.13 Acknowledge packet: “Scope Data Not Available” 83
4.3.14 Acknowledge packet: “I2C Error” 83
4.3.15 Acknowledge packet: “Feature not supported by this FPGA version” 83
4.3.16 Acknowledge packet: “Calibration data not present” 83
5.1 Table 4 – ASCII Command Summary 86
5.1.1 AINP - Set the Input Polarity 87
5.1.2 AUO1 - Select AUX_OUT1 Signal 88
5.1.3 AUO2 - Select AUX_OUT2 Signal 89
5.1.4 BLRD - Select the Baseline Restorer ‘Down’ Correction 90
5.1.5 BLRM - Select the Baseline Restorer Mode 91
5.1.6 BLRU - Select the Baseline Restorer ‘Up’ Correction 92
5.1.7 BOOT - Set Power-on State 93
5.1.8 CON1 – Select signal for AUX1 Connector 94
5.1.9 CON2 – Select signal for AUX2 Connector 95
5.1.10 CLCK - Select FPGA Clock 96
5.1.11 CLKL - Select List-Mode Clock 97
5.1.12 CUSP - Specify Non-Trapezoidal Shaping 98
5.1.13 DACF - Set DAC Offset 99
5.1.14 DACO - Select Signal for Output DAC 100
5.1.15 GAIA - Set the Analog Gain Index 101
5.1.16 GAIF - Set the Fine Gain 102
5.1.17 GAIN - Set the Total Gain 103
5.1.18 GATE - Configure the GATE Input 104
5.1.19 GPED - Select General Purpose Counter Edge 105
5.1.20 GPGA - General Purpose Counter Uses GATE 106
5.1.21 GPIN - Select the Source for the General Purpose Counter 107
5.1.22 GPMC - General Purpose Counter is Cleared with MCA 108
5.1.23 GPME - General Purpose Counter Uses MCA Enable 109
5.1.24 HVSE - Turn On/Off the PC5 High Voltage Supply 110
5.1.25 INOF - Set the Input Offset 111
5.1.26 INOG - Set the Input Offset Gain 112
5.1.27 MCAC - Select Number of MCA Channels 113
5.1.28 MCAE - Initial State of MCA Enable 114
5.1.29 MCAS - Select the MCA Source 115
5.1.30 MCSL - Set Low Threshold for MCS 116
5.1.31 MCSH - Set High Threshold for MCS 117
5.1.32 MCST - Set the MCS Timebase 118
5.1.33 PAPS - Turn On/Off the Preamp Power Supplies 119
5.1.34 PAPZ – Preamp Pole-Zero Cancellation 120
5.1.35 PDMD - Select the Peak Detect Mode 121
5.1.36 PRCL - Set Low Threshold for Preset Counts 122
5.1.37 PRCH - Set High Threshold for Preset Counts 123
5.1.38 PREC - Preset Counts 124
5.1.39 PRER - Preset Livetime 125
5.1.40 PRER - Preset Real Time 126
5.1.41 PRET - Preset Acquisition Time 127
5.1.42 PURE - Pile-up Reject Enable 128
5.1.43 RESC - Reset the Configuration to Defaults 129
5.1.44 RESL - Select Reset Lockout Interval 130
5.1.45 RTDD - Set Custom RTD Oneshot Delay 131
5.1.46 RTDE - Enable Risetime Discrimination 132
5.1.47 RTDS - Set Risetime Discrimination Sensitivity 133
5.1.48 RTDT - Set Risetime Discrimination Threshold 134
5.1.49 RTDW - Set Custom RTD Oneshot Width 135
5.1.50 SCAH - Set SCA High Threshold 136
5.1.51 SCAI - Set SCA Index 137
5.1.52 SCAL - Set SCA Low Threshold 138
5.1.53 SCAO - Select SCA Output Level 139
5.1.54 SCAW - Select SCA Output Pulse Width 140
5.1.55 SCOE - Set Digital Scope Trigger Edge 141
5.1.56 SCOG - Set Digital Scope Gain 142
5.1.57 SCOT - Set Digital Scope Trigger Position 143
5.1.58 SOFF - Set Spectrum Offset 144
5.1.59 SYNC – Select List-Mode Sync Source 145
5.1.60 TECS - Turn On/Off the PC5 Thermoelectric Cooler (TEC) Supply and Set the Temperature 146
5.1.61 TFLA - Select Flat Top Width 147
5.1.62 THFA - Select Threshold for Fast Channel 148
5.1.63 THSL - Select Threshold for Shaped Channel 149
5.1.64 TLLD - Select Threshold for Low-Level Discriminator (LLD) 150
5.1.65 TPEA - Set Peaking Time 151
5.1.66 TPFA - Select Peaking Time for Fast Channel 152
5.1.67 TPMO - Select Test Pulser Mode 153
Programmer’s Guide A5 is released with firmware version FW6.06.5, FPGA version FP5.13, and Visual Basic Demo v2.60.
|
Current as of: |
|
|
|
|
|
Current as of FW6.06.06/FP6.00 (see change list below) |
|
|
|
|
|
|
|
|
|
Section 6 is new. |
|
Describes FW releases |
|
Current as of FW6.06.05/FW5.13 |
|
Section 3.1.1 mentions that the WinUSB driver is now available via Windows Update. |
|
Section 3.1.2 adds a discussion of DHCP, and how to set a fixed IP address. |
|
Documentation for List-mode operation (see sections 4.1.10, 4.1.17, 4.1.35, 4.2.22, 4.3.15, 5.1.11, 5.1.59, and 6.1) |
|
|
|
Added transfer times (section 3.4) |
|
New commands and packet types are listed below, and in their corresponding sections |
|
Current as of FW6.06.00/FW5.11 |
|
GATE state added to status packet |
|
Additional PX5 HPGe support added |
|
|
|
‘Streaming’ feature added; ‘STREAM’ option added for ‘AUO2’ command (See section 6.2) |
|
Additional fine-gain precision added |
|
Increased ping data buffer size from 32 to 56 bytes, to handle default Linux ping size |
|
DP5G: added support for Gammarad AD592 temperature sensor via PCG ADC; scintillator temperature shows up as ‘detector temperature’ in Status Packet |
|
Added 16-bit List-mode capability (‘SYNC=NOTIMETAG’) (See sections 4.2.22, 5.1.59 and 6.1) |
|
Added List-mode configuration byte in Status Packet (Section 4.2.1) |
|
Default static IP address changed from 255.255.255.255 to 192.168.1.10 |
|
PX5: Power button changed from Green/Amber (+HV) or Red/Amber (-HV) to Green/Off and Red/Off during acquisition. (Still solid Green or Red with acquisition stopped) |
|
List-mode support (requires FP5.13) [CLKL and SYNC commands; Request packet PIDs 3/9 and 0xF0/0x16; Response packet PIDs 0x82/0x0A and 0x82/0x0B; ACK PID 0xFF/0x10] |
|
Fixed RTDS rounding error |
|
|
|
PX5: added support for HPGe HVPS option (HVSE and PAPS commands; Status packet) |
|
New uC/FPGA upload packet types to improve reliability over Ethernet |
|
Erased/uninitialized/corrupt FPGA will report FP15.15 (i.e. 0xFF) |
|
DP5/PX5: Ethernet UDP socket is no longer closed when USB VBus is detected, i.e. when USB is connected |
|
Changed input offset default values for “INOF=DEF” to accommodate PX5 front end |
|
DPG: Ethernet UDP socket is no longer closed when USB VBus is detected, i.e. when USB is connected |
|
Fixed SOFF command readback bug for -1 < SOFF < 0 |
|
PX5: fixed bug with PAPS command readback (read back 8.5 when set to 5) |
|
|
|
PX5: added HV polarity to status packet |
|
|
|
Channel numbers were changed to start with channel 0, not channel 1, to be consistent with industry standards. This affects the following text commands: MCSL, MCSH, PRCL, PRCH, SCAL, SCAH, TLLD. The data format in the spectrum response packets is unchanged, but software should interpret the first channel to be channel 0, not channel 1, to be consistent with the above commands. |
|
The fine gain now has a minimum precision of 1 part in 8192. (It was as low as 1 part in 256 in FP5.10.) This allows the ‘GAIN’ and ‘GAIF’ to be set with the precision of 1 channel or better. |
|
Calibration of the PX5 and DP5/PC5 HV supplies is supported. |
|
PAPZ (preamp pole-zero) command for PX5. |
|
Fixed RTD; in FP5.09/FP5.10, only worked with TPFA (fast peaking time) of 100nS (80MHz) or 400nS (20MHz). |
|
Added a ‘build number’ to the firmware version, in byte 37 of the status packet; FW6.06, build 0 is listed as FW6.06.00. |
|
Improved precision of THFA (Fast Threshold) and THSL (Shaped Threshold) commands. |
|
Added input offset gain command (‘INOG’) for PX5 |
|
|
|
RS232: A ‘Gap timer’ was added; support for 57.6kbaud and 19.2kbaud was added, in addition to the standard 115.2kbaud. (See section 3.3). |
|
Added ‘reboot’ bit to status packet, to aid in detecting unexpected reboot/power cycle. |
|
|
|
UDP receive buffer was expanded to handle 590-byte DHCP response |
|
Fixed THFA readback for unconfigured condition |
|
Fixed ‘Unit is Configured’ bit in status packet |
|
|
|
CON1 & CON2 commands for GammaRad (DP5G/PC5G) and PX5 |
|
|
|
Shaped channel peaking times (‘TPEA’) down to 50nS; Fast channel peaking times (‘TPFA’) down to 50nS |
|
UDP port inactivity timeout was increased from 5 to 15 seconds |
|
|
Feedback on this firmware, documentation, and VB demo should be sent to Dave Sperry, [email protected].
This only needs to be performed if upgrading a DP5 or X123 from FW5.xx to FW6.xx. Only RS232 can be used to perform this upgrade. Once a DP5 has FW6.00 or later installed, the VB Demo application can be used to upload new firmware via any interface. After this upgrade is complete the DP5/X123 is no longer compatible with ADMCA, or the DP5Loader application; it must be used with the DPPMCA or new VB Demo applications.
[THIS SECTION IS OBSOLETE. A NEW FIRMWARE LOADER APPLICATION IS AVAILABLE ON THE AMPTEK WEBSITE, WWW.AMPTEK.COM/UPLOADER.ZIP.]
The ZIP file containing the firmware and utilities need to be unzipped on to a local hard drive.
Install the DP5Loader application by running SETUP.EXE from \DP5 Upload Utility\SWSETUP.
Connect the DP5/X123 to the PC with an RS232 cable. (The RS232 cable has a 9-pin ‘D’ connector on the PC end, and a 2.5mm stereo plug on the DP5 end.)
Apply power to the DP5.
Run the DP5Loader application.
Select the COM port the DP5/X123 is connected to. Click the ‘Check Device Communications’ button. If it locates the DP5/X123, then…
Select the Upload Type as FPGA, click ‘Upload FPGA/uC HEX File’, and select ‘_dp5_fpga_v511.mcs’ from wherever the ZIP file was unzipped
When the upload completes, it says the power needs to be cycled on the DP5 – this isn’t necessary, but the DP5Loader application has to be closed and reloaded.
Once DP5Loader is restarted, click ‘Check Device Comm…’ again. Then select ‘uC’ for Upload Type, click ‘Upload FPGA/uC HEX File’ and select ‘DP5_v6.06.00.hex’ from wherever the ZIP file was unzipped. Wait a few seconds after completion before removing power from the DP5/X123.
Now, when you power-cycle the DP5, it will be running the new firmware (and is no longer compatible with the DP5Loader application or ADMCA).
You can leave the RS232 cable connected to verify communications either with the VB Demo or with the DPPMCA application, before moving on to USB or Ethernet.
Navigate to wherever the ZIP file was unzipped and locate the ‘Setup_v250’ folder.
Run ‘SETUP.EXE’ from this folder. This will install the VB5 demo application.
Run the application that was installed, ‘DP5_v250.exe’.
With the RS232 cable connected to the DP5, select the appropriate COM port.
Switch to the
‘spectrum’ tab, and click ‘Single Update’.
It should acquire data from the DP5 (which is in an unconfigured
state.) If the values above the spectrum update, and it displays
‘Spectrum OK’ in the lower left text box, then it is
communicating.
[Steps 6-8 allow configuring an IP address, if
Ethernet will be used.]
Go back to the ‘Communication’ tab, and set the IP Address options on the right. Click ‘Send to DP5’ when done.
Now, you should be able to connect Ethernet to the DP5. The green light on the DP5 Ethernet jack should light and blink to indicate a valid link.
Restart the DP5_v250.exe application. (It needs to be restarted to change the communication interface.) Click the ‘Search for DP5s’ button. It should display a separate form, which after a short time should show the DP5, along with its IP address, etc. Click on it to pass the IP address back to the Communication tab.
Click the ‘spectrum’ tab, and click ‘auto update’. It should update the data, indicating that it is able to communicate via Ethernet.
Click the
‘Configuration’ tab. [Currently, the demo app can only
send a text configuration file.] Click the ‘Send text
configuration file’ button. For a SDD with 5V preamp, select
the ‘SDD Config.txt’ configuration file from the
location where the ZIP file was unzipped. (This file is for an
Amptek SDD w/ 5V preamp: HV=-190, TEC=220K). This file can be edited
to modify the DP5 parameters (make sure to save the changes before
sending it!)
Note 1: The VB5 source code for the demo is
located in the Setup_v250\Source folder.
The DP5 supports three communication interfaces: USB, Ethernet and RS232. Details about the specific interfaces are in the following sections.
Note: Attempting to use multiple interfaces simultaneously can result in unexpected behavior. In firmware prior to FW6.06.04 (DP5/PX5) or FW6.06.03 (DP5G), the Ethernet general UDP socket is disabled whenever the USB port is connected to a live host port. The socket is re-enabled if the USB cable is disconnected, or the host/hub to which the DP5 is physically connected is powered off. In FW6.06.04 (DP5/PX5) or FW6.06.03 (DP5G) and later, this is no longer the case – the UDP port is always open, regardless of whether USB is connected. [This was changed because noise on the unconnected USB connector caused Ethernet dropouts.]
The ‘Netfinder’ socket remains functional when USB is connected, and the contents of the Netfinder packet indicate if the UDP socket is unavailable because of USB.
The DP5G checks to see if either the USB or RS232 connectors are connected to a live port at power-up. If so, the Ethernet controller is not initialized (to save power), and will remain non-functional until the next power cycle.
The DP5 supports ‘full-speed’ (12Mbps) USB 2.0. Three endpoints are used: the ‘control’ endpoint (EP0); EP1 IN (for response packets from the DP5 to host PC); and EP2 OUT (for request packets from the host PC to DP5.)
Transfers on EP1 and EP2 are terminated by a ‘short packet’ (a packet smaller than the max packet size of 64 bytes), or a zero-length packet (‘ZLP’).
For the DP5, PX5, and DP5G, the USB Vendor ID (VID) and Product ID (PID) are:
VID: 0x10C4
PID: 0x842A
The DPPMCA application (and DP5 Visual Basic demo) use the WinUSB driver. This is a Microsoft product that is native to Vista and Windows 7 (32- and 64-bit), and installable on WinXP. The Visual Basic demo includes source code, and VC++ classes are available for those wishing to write their own communication software.
The WinUSB driver has been tested by WinQual and signed for WinXP 32/64, Vista 32/64, and Win7 32/64. It is available via Windows Update, which means that a PC with an Internet connection should be able to install the driver automatically. Directions for manually installing the driver are in the ‘WinUSB Driver Installation’ folder in the ZIP file.
The ZIP file includes the Microsoft document ‘WinUsb_HowTo.docx’, which describes the complex process of using Windows’ SetupAPI to find the device path, etc. [The VB demo demonstrates this technique, as well as setting pipe policies, opening pipes, sending and receiving data, etc.]
USB.h and USB100.h contain many structures, enums, etc. used by Windows’ USB implementation – these files (from DDK6001) are in the ZIP file.
Microsoft’s website gives information on how to call the specific WinUSB functions:
http://msdn.microsoft.com/en-us/library/ff540046(v=VS.85).aspx
The WinUSB driver utilizes two GUIDs:
Setup Class GUID: {6A4E9A2D-9368-4f01-8E60-B3F9CDBAB5E8}
Interface Class GUID: {5A8ED6A1-7FC3-4b6a-A536-95DF35D03448}
The DP5 incorporates a 10base-T Ethernet controller and embedded TCP/IP stack to provide Ethernet support via a standard RJ45 jack. The DP5 supports auto-negotiation for half- and full-duplex. Only 10Mbit/s is supported.
PING and ARP are supported. A fixed IP address can be specified, or a dynamic address can be obtained from a DHCP server. (If ‘dynamic’ is selected, and the DP5 is unsuccessful in obtaining a lease from a DHCP server, it will fall back to its previously-programmed static address.) The IP configuration (fixed/dynamic, IP address, netmask, gateway, and port) can be programmed via any of the DP5 communication interfaces (Ethernet, USB or RS232).
Note: By default, the DP5/PX5/DP5G is configured to use a dynamic IP address. If no DHCP server is present, then the device falls back to the programmed static IP address. Prior to FW6.06.05, if no static IP address was programmed, then the device defaulted to 255.255.255.255, which is not a valid IP address. In this case, if a DHCP server isn’t available, then USB or RS232 must be used to assign a valid static IP address. As of January 2012, the VB Demo is the only application which can perform this. In FW6.06.05 and later, if no DHCP server is present and a static IP address hasn’t been programmed, the device will default to 192.168.1.10.
In addition, in order to save power, the DP5G powers down the Ethernet controller when a USB or RS232 connection is detected at power-up. This means for a Gammarad (or other devices that can be powered via USB), external power should be applied, and then USB (or RS232) can be connected after approximately five seconds (or more).
Also, for whatever reason, the DP5/PX5/DP5G work poorly via Ethernet when directly connected to a PC’s Ethernet port. They work fine if connected to the PC via an Ethernet hub or switch.
Prior to FW6.06.06, the Ethernet implementation had a 32-byte PING buffer. This worked with Windows, but not with the Linux default ping size of 56 bytes. In FW6.06.06, the PING buffer was increased to accommodate the Linux default ping size. Note that for Linux ping support with older firmware, the Linux default ping size can be overridden.
The DP5 supports two UDP ports for communication: one port is for general communications (fixed at UDP port 10001 in FW6.06, and possibly programmable in later firmware releases), and the other is for device discovery via the Silicon Labs Netfinder protocol (UDP port 3040.)
By default, the DP5 uses UDP port 10001 for communications. Once a packet exchange has taken place on this port, the socket is ‘bound’ to the IP address and source port of the host it exchanged packets with. Once the socket is bound, packets from other IP addresses will be ignored. After approx. 15 seconds of inactivity on the socket, the socket is reset so that it can once again connect to any IP.
To not allow other hosts to seize control of the DP5, the host can continue exchanging packets so that this timeout does not occur. “Interface keep-alive” Request Packets can be sent periodically, if there is no other periodic traffic, to keep the socket from resetting. Or an “Interface – lock” Request Packet can be sent, in which case the socket will not be reset until power is cycled on the DP5, or the host removes the lock by sending an “Interface keep-alive - allow sharing” or “Interface keep-alive - no sharing” Request Packet.
Broadcast packets can be received by the General UDP Port, which may be useful if multiple DP5s are on a subnet, and synchronization or centralized control is desired. (Request packets such as ‘Enable MCA’ and ‘Clear Spectrum’ could be useful as broadcasts.) As of firmware FW6.06, all Request Packets received by the DP5 will generate a Response Packet, which isn’t desirable for broadcasts. Future versions of the firmware may use the most significant bit of the PID2 packet ID to indicate a broadcast packet, so that DP5s will be able to suppress Response Packets. Also, a command or Request Packet will be added so that a DP5 can be configured whether to process or ignore broadcast packets. (This will allow some DP5s on a subnet to not participate in broadcasts, if this is desired.)
The existing protocol works over the Internet, but possibly not very well. As it uses raw UDP packets with no sequence numbers, and spectrum packets are large enough that they’re split into multiple UDP packets, theoretically the spectrum UDP packets could be received out of sequence, with no way to tell. Eventually, the firmware will have the option to encapsulate each UDP packet within the DP5 packet structure, and use the DP5 packet PIDs as sequence numbers. This should allow the protocol to be more robust when routed over the Internet – the packets will be able to be reordered if they arrive out of sequence, and it will be easier to detect dropped packets.
Timeouts
Generally, the DP5 sends the Response or ACK packet after it has completed the operation specified by the Request Packet. This is usually happens quickly, so that the response is sent with little delay. Since the DP5 always sends a Response or ACK Packet in response to receiving a Request Packet, it may be desirable to use a timeout interval to identify missed packets.
The Visual Basic demonstration software uses a timeout interval of 1000mS by default. However, there are a few packet types which require a longer timeout interval because they may take longer than 1s to execute:
|
Description |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Recommended Timeout |
|
Request diagnostic data |
3 |
5 |
0 |
0 |
2500mS |
|
Erase FPGA image |
0x30 |
1 |
0 |
2 |
5000mS |
|
Erase uC image #1 |
0x30 |
5 |
0 |
2 |
2000mS |
|
Write 512-byte Misc Data |
0xF0 |
0x09 |
2 |
0 |
1000mS |
The DP5 supports the Silicon Labs ‘Netfinder’ protocol on UDP port 3040. This allows DP5s to be ‘discovered’ – this is particularly useful if DHCP is used to assign dynamic IP addresses, as the DP5 may have an unknown address.
By broadcasting a Netfinder ‘Broadcast Identity Request’ to UDP port 3040, the host directs all DP5s that receive the broadcast to respond with an ‘Identity Reply’, which includes the DP5 serial number, IP address, MAC address, a text description (if one was programmed), the time the device has been powered, and the status of the interface. The host collects the responses from all the DP5s on the subnet, and can then determine which IP address to access based on DP5 serial number, description, etc.
The ‘Broadcast Identity Request’ is 6 bytes in size and is defined below. The format of the ‘Identity Reply’ is also listed below – its size is variable because it contains several variable-length null-terminated strings. Note that the 2nd string, the description, comes from the DP5’s ‘Misc Data’ buffer. If the firmware finds a null-terminated string of 40 characters or less, it will send that as the description string. Otherwise, ‘(no description)’ is used. [Note: the DP5 will not respond to the Netfinder ‘standard’ 4-byte version of the ‘Broadcast Identity Request’ as defined by Silicon Labs.]
Note that because UDP packet reception is not guaranteed (packets aren’t automatically resent), occasionally not all responses will be received. It may be necessary to send multiple Identity Request packets to receive responses to all units. (This depends on how busy the network is, and how many DP5s are present.) Each subsequent Identity Request should use a different sequence ID – a DP5 will not respond to a repeated Identity Request with the same sequence ID.
Note that while the ‘Broadcast Identity Request’ packet is normally sent as a UDP broadcast packet (i.e. a destination IP of xxx.xxx.xxx.255), it can also be sent to a specific IP address. Also note that UDP broadcast packets generally are limited to the local subnet, and not routed beyond that.
The ‘Interface Sharing Request’ format is also listed below. If a Netfinder Identity Reply has indicated that a DP5 is in use, but that sharing is allowed, the host can send the ‘Interface Sharing Request’ to the Netfinder port of that DP5. The DP5 will use an ACK packet to indicate to its current host that a Sharing Request has been received. If that host wishes to grant the request, it does so by stopping transfers to the DP5’s UDP socket, which will allow the socket to reset itself and the new host to gain control of it. [No acknowledgement of the ‘Interface Sharing Request’ is sent by the DP5 – the host can resend it periodically, and either check the Interface Status in the Netfinder ‘Identity Reply’, or try sending packets to the DP5 UDP port to see if it responds.]
Broadcast Identity Request – 6 bytes
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
|
Value |
0x00 |
0x00 |
Random 16-bit sequence ID |
0xF4 |
0xFA |
|
Identity Reply – variable length
|
Data Offset |
Value |
|
0 |
0x01 |
|
1 |
Ethernet General UDP Port Status: 0 = Interface is open (unconnected); 1 = Interface is connected (sharing is allowed); 2 = Interface is connected (sharing is not allowed); 3 = Interface is locked 4 = Interface is unavailable because USB is connected |
|
2-3 |
Replication of Random 16-bit sequence ID received from ‘Identity Request’ |
|
4-5 |
Event 1 Days |
|
6 |
Event 1 Hours |
|
7 |
Event 1 Minutes |
|
8-9 |
Event 2 Days |
|
10 |
Event 2 Hours |
|
11 |
Event 2 Minutes |
|
12 |
Event 1 Seconds |
|
13 |
Event 2 Seconds |
|
14-19 |
MAC address (MSB…LSB) |
|
20-23 |
IP Address (MSB…LSB) |
|
24-27 |
Subnet Mask (MSB…LSB) |
|
28-31 |
Default Gateway (MSB…LSB) |
|
variable |
Null-terminated string – ‘Amptek DP5’ + serial number |
|
variable |
Null-terminated string – Description/misc text |
|
variable |
Null-terminated string – Event 1 description |
|
variable |
Null-terminated string – Event 2 description |
Interface Sharing Request – 6 bytes
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
|
Value |
0x04 |
0x00 |
Random 16-bit sequence ID |
0xF4 |
0xFA |
|
The RS232 port on the DP5 operates at 115,200 baud, with 1 start bit, 8 data bits, no parity bit, and 1 stop bit. Neither hardware nor software handshaking is used. 57,600 or 19,200 baud operation can be selected; however, selecting these rates will disable the Ethernet port.
The RS232 interface employs a ‘gap timer’ on its receiver, to aid in synchronization – if the time between consecutive received bytes exceeds 100mS, all buffered bytes are discarded, and the DP5 will resume searching for the sync characters that signal the start of a new packet. No acknowledge packet will be sent to indicate this has occurred.
In response to a Spectrum (or spectrum + status) request packet, the DP5 will briefly shut off data acquisition, so that it can make a copy of the spectrum memory. When complete, the MCA is re-enabled and the acquisition continues. This ‘deadtime’ is a function of how many channels are selected (256, 512, etc.) and whether the FPGA is running at 20 or 80MHz. This ‘deadtime’ will occur each time the spectrum is read out, and this is reflected in the acquisition time; the acquisition timer is stopped during this ‘deadtime’, while the realtime timer continues to run.
[Note that there is no deadtime penalty for using the ‘ request spectrum and clear’ (or ‘request spectrum + status and clear’) form of the request packet – the clear function happens simultaneously with the buffering function, and does not add to the ‘deadtime’.]
The measured ‘deadtimes’ are:
|
# of Channels |
20MHz Clock |
80MHz Clock |
|
256 |
228uS |
113uS |
|
512 |
420uS |
189uS |
|
1024 |
804uS |
343uS |
|
2048 |
1.57mS |
650uS |
|
4096 |
3.12mS |
1.27mS |
|
8192 |
6.18mS |
2.50mS |
The USB, Ethernet and RS232 transfer times were measured, using an oscilloscope. The transfer times include the time from when the request packet was started to when the response packet was completed. (i.e. the whole round-trip transfer was measured.)
The transfer times
include the ‘deadtime’ due to buffering, listed above.
The transfer times were measured with the 80MHz clock selected, and
were measured using the ‘Request spectrum + status’
request packet. The transfers will run at the same rate with the
20MHz clock, except the ‘deadtime’ for buffering will be
longer. So, for 20MHz timing, use the 80MHz timing, plus the
difference between the 20MHz and 80MHz buffering ‘deadtime’.
|
# of Channels |
USB |
Ethernet |
RS232
|
RS232 |
|
256 |
2.8mS |
11mS |
74mS |
146mS |
|
512 |
3.5mS |
19mS |
140mS |
279mS |
|
1024 |
4.8mS |
35mS |
273mS |
544mS |
|
2048 |
7.5mS |
70mS |
538mS |
1.07S |
|
4096 |
12.7mS |
134mS |
1.07S |
2.14S |
|
8192 |
24.2mS |
263mS |
2.14S |
4.22S |
All communications with the DP5 follow a request/response format: the host sends a Request Packet to the DP5, and the DP5 returns a Response Packet. The Response Packet sent by the DP5 to the host will be:
a packet containing the requested data;
an acknowledge (ACK) packet, indicating the request packet was received and interpreted without error (if the request packet is not one for which data is returned);
an ACK packet, indicating the request packet contains an error in structure or content;
an ACK packet, indicating why the request can’t be executed;
an ACK packet, indicating that an ASCII command had a unrecognized command field or an invalid parameter field – the command in question will be echoed in the data field of the ACK packet.
an ACK packet, indicating the request packet was received and interpreted without error, and a sharing request was received from another computer via Ethernet;
All packets sent to and from the DP5 use the same basic packet format: a 6-byte header, which defines the type and length of the packet, an optional data field, and a 16-bit checksum. For packets sent to the DP5, the optional data field can be up to 512 bytes, for a maximum packet size of 520 bytes. For packets sent by the DP5 to the host PC, the maximum data field size is 32767 for a maximum packet size of 32775 bytes.
Packet Format
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6...5+LEN |
6+LEN |
7+LEN |
|
Value |
0xF5 |
0xFA |
PID1 |
PID2 |
LEN_MSB |
LEN_LSB |
Data (optional, 0-512 bytes) |
CHKSUM MSB |
CHKSUM LSB |
Fields:
Offset 0 & 1: Sync bytes – these fields have fixed values of 0xF5 and 0xFA.
Offset 2 & 3: Packet ID fields 1 & 2 (PID1 & PID2) – these define the meaning of the packet, as summarized in Table 1, Table 2 and Table 3.
Offset 4 & 5: 16-bit length field (LEN) of the optional data field. If data field is not present, LEN=0.
If LEN =0:
Offset 6 & 7: 16-bit checksum: MSB, then LSB. This is a two’s-complement of the 16-bit sum of all bytes prior to the checksum. (i.e. the 16-bit sum of the checksum and all other bytes in the packet is 0.)
If LEN > 0:
Offset 6: The start of the data field, whose length is given by the 16-bit LEN field. The last byte is offset 5+LEN.
Offset 6+LEN, Checksum, as described above.
7+LEN:
|
Description |
Support* |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data (optional) |
Response |
|
Request status packet |
ALL |
1 |
1 |
0 |
0 |
|
Data packet |
|
Request spectrum |
ALL |
2 |
1 |
0 |
0 |
|
Data packet |
|
Request & clear spectrum |
ALL |
2 |
2 |
0 |
0 |
|
Data packet |
|
Request spectrum + status |
ALL |
2 |
3 |
0 |
0 |
|
Data packet |
|
Request & clear spectrum + status |
ALL |
2 |
4 |
0 |
0 |
|
Data packet |
|
Request digital scope data |
ALL |
3 |
1 |
0 |
0 |
|
Data packet |
|
Request 512-byte misc data |
ALL |
3 |
2 |
0 |
0 |
|
Data packet |
|
Request digital scope data & re-arm scope |
ALL |
3 |
3 |
0 |
0 |
|
Data packet |
|
Request Ethernet settings |
ALL |
3 |
4 |
0 |
0 |
|
Data packet |
|
Request diagnostic data |
ALL |
3 |
5 |
0 |
0 |
|
Data packet |
|
Request Netfinder packet |
6.01 |
3 |
7 |
0 |
0 |
|
Data packet |
|
Perform I2C transfer |
6.01 |
3 |
8 |
varies |
I2C transfer description |
ACK or Data |
|
|
Request List-mode data |
6.06.05 |
3 |
9 |
0 |
0 |
|
ACK or Data |
|
Request Option PA calibration data |
6.07.02; M |
3 |
0x0A |
0 |
0 |
|
ACK or Data |
|
Request 32-bit SCA counters |
ALL |
4 |
1 |
0 |
0 |
|
|
|
Latch + Request 32-bit SCA counters |
ALL |
4 |
2 |
0 |
0 |
|
|
|
Latch + Clear + Request 32-bit SCA counters |
ALL |
4 |
3 |
0 |
0 |
|
|
|
Text configuration (to DP5) |
ALL |
0x20 |
2 |
varies |
ASCII configuration |
ACK packet |
|
|
Text configuration Readback (from DP5) |
6.01 |
0x20 |
3 |
varies |
ASCII configuration |
Data packet |
|
|
Erase FPGA image |
ALL |
0x30 |
1 |
0 |
2 |
0x12 0x34 |
ACK packet |
|
Upload packet (FPGA) |
ALL |
0x30 |
2 |
varies |
|
ACK packet |
|
|
Reinitialize FPGA |
6.06.01 |
0x30 |
3 |
0 |
0 |
|
|
|
Erase uC image #1 |
ALL |
0x30 |
5 |
0 |
2 |
0x12 0x34 |
ACK packet |
|
Upload packet (uC) |
ALL |
0x30 |
7 |
varies |
|
ACK packet |
|
|
Switch to uC image #1 |
ALL |
0x30 |
9 |
0 |
2 |
0xA5 0xF1 |
ACK packet |
|
Upload packet (FPGA), FPGA ACK |
6.06.04 |
0x30 |
0x0B |
varies |
|
FPGA ACK packet |
|
|
Clear Spectrum Buffer |
ALL |
0xF0 |
0x01 |
0 |
0 |
|
ACK packet |
|
Enable MCA/MCS |
ALL |
0xF0 |
0x02 |
0 |
0 |
|
ACK packet |
|
Disable MCA/MCS |
ALL |
0xF0 |
0x03 |
0 |
0 |
|
ACK packet |
|
Arm digital oscilloscope |
ALL |
0xF0 |
0x04 |
0 |
0 |
|
ACK packet |
|
Autoset input offset |
ALL; D, P |
0xF0 |
0x05 |
0 |
0 |
|
ACK packet |
|
Autoset fast threshold |
ALL |
0xF0 |
0x06 |
0 |
0 |
|
ACK packet |
|
Read IO3-0 |
|
0xF0 |
0x07 |
0 |
0 |
|
|
|
Write IO3-0 |
ALL |
0xF0 |
0x08 |
0 |
1 |
|
ACK packet |
|
Write 512-byte Misc Data |
ALL |
0xF0 |
0x09 |
2 |
0 |
|
ACK packet |
|
Set DCAL |
ALL; D, P |
0xF0 |
0x0A |
0 |
2 |
LSB, MSB |
ACK packet |
|
Set PZ correction |
ALL |
0xF0 |
0x0B |
0 |
1 |
PZ correction |
ACK packet |
|
Set uC temp cal |
ALL |
0xF0 |
0x0C |
0 |
1 |
uC temp offset |
ACK packet |
|
Set ADC Cal (gain/offset) |
ALL |
0xF0 |
0x0E |
0 |
2 |
gain, offset |
ACK packet |
|
Clear G.P. Counter |
ALL |
0xF0 |
0x10 |
0 |
0 |
|
ACK packet |
|
Set Ethernet settings |
ALL |
0xF0 |
0x11 |
0 |
0x13 |
Fixed/Dyn, IP[4], Mask[4], Gateway[4], Dest. IP[4], Port[2] |
ACK packet |
|
Select high-pass time constant |
6.01 |
0xF0 |
0x12 |
0 |
1 |
Time constant |
ACK packet |
|
Select RS232 baud rate |
6.05 |
0xF0 |
0x13 |
0 |
1 |
Baud rate |
ACK packet |
|
Set HV Cal (gain/offset) |
6.05; D, P |
0xF0 |
0x14 |
0 |
2 |
gain, offset |
ACK packet |
|
Set 1.6uS PZ correction |
6.06; P |
0xF0 |
0x15 |
0 |
1 |
PZ correction |
ACK packet |
|
Clear/Sync List-mode timer |
6.06.05 |
0xF0 |
0x16 |
0 |
0 |
|
ACK packet |
|
Set zero offset, 1V scale |
6.06.07; M |
0xF0 |
0x19 |
0 |
2 |
Signed, MSB first |
ACK packet |
|
Set zero offset, 10V scale |
6.06.07; M |
0xF0 |
0x1A |
0 |
2 |
Signed, MSB first |
ACK packet |
|
Interface keep-alive - allow sharing |
ALL |
0xF0 |
0x20 |
0 |
0 |
|
ACK packet |
|
Interface keep-alive - no sharing |
ALL |
0xF0 |
0x21 |
0 |
0 |
|
ACK packet |
|
Interface keep-alive - lock |
ALL |
0xF0 |
0x22 |
0 |
0 |
|
ACK packet |
|
Latch SCAs |
|
|
|
|
|
|
|
|
Latch + clear SCAs |
|
|
|
|
|
|
|
|
Clear SCAs |
|
|
|
|
|
|
|
|
Comm test - Request ACK packet |
ALL |
0xF1 |
0…15 |
0 |
0 |
|
ACK packet |
|
Comm test - Echo packet |
ALL |
0xF1 |
0x7F |
varies |
Data to be echoed |
Data packet |
|
|
|
Items in italics are considered calibration values and don’t normally need to be changed |
||||||
|
|
* Initial firmware release which supports this packet type; If not support by all three DPP types, then: D = supported by DP5, P = supported by PX5, and G = supported by DP5G |
|
|||||
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
1 |
1 |
0 |
0 |
0xFE |
0x0F |
Purpose: This request directs the DP5 to construct a status packet and send it to the host PC. The status packet can be requested with this request packet, or with one of the ‘Request Spectrum plus Status’ variants, in which case the status packet is included in the packet data field along with the spectrum data.
The status packet contains information about the current state of the spectrum, and of the DP5. Its format is listed with the “Status Packet” Response Packet.
Response: If no errors are detected, a “Status Packet” Response Packet will be returned.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of the requested data.
Request packet: “Request Spectrum”
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
2 |
1 |
0 |
0 |
0xFE |
0x0E |
Request packet: “Request and clear Spectrum”
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
2 |
2 |
0 |
0 |
0xFE |
0x0D |
Request packet: “Request Spectrum plus Status”
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
2 |
3 |
0 |
0 |
0xFE |
0x0C |
Request packet: “Request and clear Spectrum plus Status”
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
2 |
4 |
0 |
0 |
0xFE |
0x0B |
Purpose: These requests direct the DP5 to take a ‘snapshot’ of the spectrum and corresponding status data and begin transmitting that data. If the ‘Request and Clear’ form of this packet is send, it will also clear the spectrum and associated status data, and if the MCA was enabled when this request was received, then a new acquisition will start.. [Where should the details about what status fields get cleared be discussed?]
Response: If no errors are detected, than either a ‘spectrum’ response packet, or a ‘spectrum plus status’ response packet will be sent by the DP5.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of the requested data. If the FPGA failed initialization, then an FPGA error ACK packet will be returned.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
3 |
1 |
0 |
0 |
0xFE |
0x0D |
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
3 |
3 |
0 |
0 |
0xFE |
0x0B |
Purpose: These request that the DP5 send a 2048-byte digital scope packet. The second form of the command will also re-arm the digital scope.
Response: If no errors are detected, the DP5 will respond with a ‘2048-byte Scope Packet’ Response Packet (PID1=0x82, PID2=1) or a ‘2048-byte Scope Packet w/ Overflow’ Response Packet (PID1=0x82, PID2=3). (See the Response Packet descriptions for details.)
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of the requested data. Also, if no data is available because the scope hasn’t triggered, a “Scope data not available” ACK packet will be returned instead of the requested data.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
3 |
2 |
0 |
0 |
0xFE |
0x0C |
Purpose: This requests that the DP5 send the 512-bytes of ‘miscellaneous data’ that is stored in the DP5’s non-volatile memory. (See also the “Write Misc Data” Request Packet for information on to write this data to the DP5.)
Response: If no errors are detected, the DP5 will respond with the “512-byte Misc Data” Response Packet (PID1=0x82, PID2=2).
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of the requested data.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
3 |
4 |
0 |
0 |
0xFE |
0x0A |
Purpose: This requests that the DP5 send the Ethernet settings that are stored in the DP5’s non-volatile memory. (See also the “Set Ethernet Settings” Request Packet for information on how to write these settings.)
Response: If no errors are detected, the DP5 will respond with the “Ethernet Settings” Response Packet (PID1=0x82, PID2=4).
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of the requested data. Additionally, if no Ethernet controller is detected on the DP5, the “CP2201 not found” ACK packet will be returned instead of the requested data.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
3 |
5 |
0 |
0 |
0xFE |
0x09 |
Purpose: This requests that the DP5 perform some diagnostic tests, and return a suite of diagnostic data.
Response: If no errors are detected, the DP5 will respond with the “Diagnostic Data” Response Packet (PID1=0x82, PID2=5). Note: the DP5 runs a full memory test on the 512KB SRAM, which takes some time. The DP5 will respond with the Response Packet a maximum of 2.5s after receiving the Request Packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of the requested data.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
3 |
7 |
0 |
0 |
0xFE |
0x07 |
Purpose: This requests a Netfinder packet, but through the active communications port. [The ‘Netfinder packet’ is generally obtained via a broadcast on the TCP/IP Netfinder socket. See section 3.2.4 for details.]
Response: If no errors are detected, the DP5 will respond with the “Netfinder Packet” Response Packet (PID1=0x82, PID2=8).
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of the requested data.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6…5+LEN |
6+LEN |
7+LEN |
|
Value |
0xF5 |
0xFA |
3 |
8 |
varies |
varies |
varies |
||
Purpose: The data field of this Request Packet contains the description for an I2C transfer to be performed by the DP5. Read, Write and Combined I2C transfers are supported.
The format of the data field is listed below. The first 3 bytes are mandatory; following those are the bytes to be written, which can number from 0 to a maximum of 32. Therefore, the size of the data field (LEN) has a minimum of 3 and a maximum of 35.
|
Data Offset |
Allowed Values |
Value |
|
0 |
1-127 |
7-bit I2C slave address (‘SA’) |
|
1 |
0-32 |
Number of bytes to read (‘NOBR’) |
|
2 |
0-32 |
Number of bytes to write (‘NOBW’) |
|
3-34 |
0-255 |
Bytes to be written (optional) |
Note: The DP5 uses Slave Addresses of 0x20 and 0x4C. The optional PC5 uses Slave Addresses of 0x1F, 0x34, 0x50 and 0x6D. Transfers should not be attempted using these Slave Addresses. Also, the value in offset 0 is the 7-bit address – this value will be shifted left one bit, and the appropriate R/W bit merged in, before it’s transmitted on the I2C bus.
Response: If no errors are detected, the DP5 will respond either with an ACK OK packet (if NOBR=0), or with an I2C Response Packet with the bytes read from the I2C slave (if NOBR > 0).
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of the requested data or the ACK OK packet. If the I2C master didn’t detect the I2C ACK at the proper time, an ‘I2C ERROR’ ACK packet will be returned. A BAD PARAMETER ACK packet will be returned if there are structure problems with the request. (NOBR=NOBW=0; LEN not equal to NOBW+3; NOBR > 32; NOBW > 32; or SA = 0).
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
3 |
9 |
0 |
0 |
0xFE |
0x05 |
Purpose: This requests that the DP5 send available List-mode data.
Response: . A ‘List-mode data’ Response Packet (PID1=0x82, PID2=9) will be returned, with between 0 and 1020 records (0 to 4092 bytes.) If the List-mode FIFO is full, a ‘List-mode data, FIFO full’ Response packet (PID1=0x82, PID2=10) is returned, which will contain 1024 records. [The FIFO size may be increased in future FPGA versions; hence, the two different response packets, rather than having the application monitor the returned data size.]
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of the requested data. Additionally, if the firmware has been upgraded for List-mode support, but the FPGA hasn’t, a ‘Feature not supported by this FPGA version’ ACK packet will be returned instead of the List-mode data Response Packet.
Note: The ‘Clear Spectrum’ Request Packet clears the List-mode FIFO, in addition to clearing the spectrum buffer.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
3 |
0x0A |
0 |
0 |
0xFE |
0x04 |
Purpose: This requests the MCA8000D Option PA calibration data, if available.
Response: If the MCA8000D has the Option PA calibration installed, then an Option PA Calibration Data Response Packet will be returned.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of the requested data. Additionally, if the Option PA calibration has not been performed on this MCA8000D, a ‘Calibration data not present’ ACK packet will be returned instead of the Option PA Calibration Data Response Packet.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
4 |
1 |
0 |
0 |
0xFE |
0x0C |
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
4 |
2 |
0 |
0 |
0xFE |
0x0B |
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
4 |
3 |
0 |
0 |
0xFE |
0x0A |
Purpose: These request that the DP5 send 64 bytes of SCA counter data (16 SCAs x 32 bits each). The data is read from the SCA counter latches, so the SCAs must have been latched, either via the ‘Latch’ form of these requests, a ‘Latch SCA’ Request Packet (which is TBD in FW6.01), or a hardware signal (also TBD.) The ‘Clear’ form of these requests will clear the SCA counters after the data has been latched.
Response: If no errors are detected, the DP5 will respond with a “64-byte SCA Packet” Response Packet (PID1=0x83, PID2=1).
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of the requested data.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6…5+LEN |
6+LEN |
7+LEN |
|
Value |
0xF5 |
0xFA |
0x20 |
2 |
varies |
varies |
varies |
||
Purpose: This sends a
Text Configuration packet to the DP5, which the DP5 interprets and
executes. (See the section on ASCII Commands for information on
individual commands.) The commands are packed into the Data field,
with the following rules:
Alphabetic characters must be uppercase.
Each command consists of a 4-character command, followed by “=”, followed by the parameter (max of 10 characters), and terminated by a semicolon (Ex: “TPEA=10;”)
Units may be included with the parameter, but they are ignored, and count towards the 10-character maximum length for the parameter. (Ex: “TPEA=10US;”)
The commands are packed together with no whitespace of any kind (tabs, spaces, CR/LF, etc.)
For some commands, the ordering is important. See the ‘ASCII Commands’ section for more discussion of this.
If all commands fit in the max 512 byte data field, then the configuration can be sent as a single packet. If they don’t fit, then additional Text Configuration packets can be sent. Generally, the ASCII Command “RESC=Y;” would be the first command of the first packet, and it would not appear in later packets. If additional packets are needed, ensure that commands are not chopped between packets – only complete command/parameter strings are allowed.
Here’s an example of the data field:
RESC=YES;CLCK=AUTO;TPEA=10US;TFLA=0US;CUSP=50%;
RESL=3000US;PDMD=NORM;THSL=1.00%;THFA=40;
Response: If no errors are detected, the DP5 will respond with an ACK OK packet. This indicates that all commands were recognized and executed without error.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of the requested data. If one or more errors are detected while parsing the Text Configuration, an ‘Unknown/Bad Parameter’, ‘Unrecognized Command’, or ‘PC5 Not Present’ ACK packet will be returned, and the data field will contain the ASCII command and parameter which caused the error. If more than one error was detected, only the last error & command will be returned.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6…5+LEN |
6+LEN |
7+LEN |
|
Value |
0xF5 |
0xFA |
0x20 |
3 |
varies |
varies |
varies |
||
Purpose: This sends a Text Configuration Readback Request Packet to the DP5, which the DP5 uses as a ‘template’ to read back the current configuration. The data field is the same format as for the Text Configuration Request Packet – a list of ASCII command and parameters, separated by semicolons. The DP5 strips off any parameters and replaces them with the current settings for each command specified. The result is returned in the Configuration Readback Response Packet. It is possible to send a text configuration packet via the Text Configuration Request Packet (PID1=0x30 / PID2=2), and then reuse the same packet data field for the Text Configuration Readback Request Packet (PID1=0x30 / PID2=3) to read back the actual settings that the DP5 derived from the Text Configuration packet.
The “=” and parameter are optional for each command listed; the minimum required is the 4-character commands, separated by semicolons. There is one exception to this – the SCAI (SCA Index) command. As this is a directive to the command processor rather than a true command, the ‘=’ and parameter are required. Here is an example data field, to read back the low and high thresholds for SCA1 & SCA2:
“SCAI=1;SCAL;SCAH;SCAI=2;SCAL;SCAH;”
Also note that the ‘RESC’ (Reset Configuration) has no meaning in the context of Configuration Readback – if included, it will return ‘RESC=?;’.
Any number of commands may be read back, as long as they fit within the maximum data field of 512 bytes. As of FW6.01, there is no error handling for the condition where the generated Response Packet exceeds the maximum data field size, so limiting the size of the Request Packet data field is a good idea, to avoid this issue.
Response: If no errors are detected, the DP5 will respond with a Configuration Readback Response Packet (PID1=0x82 / PID2 = 7). Any command which is not recognized in the data field will return “CMDA=??;”, where ‘CMDA’ is the unknown command. [This is returned in the Response Packet with the rest of the commands.]
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of the requested data. If one or more errors are detected while parsing the Text Configuration, an ‘Unknown/Bad Parameter’, ‘Unrecognized Command’, or ‘PC5 Not Present’ ACK packet will be returned, and the data field will contain the ASCII command and parameter which caused the error. If more than one error was detected, only the last error & command will be returned.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xF0 |
1 |
0 |
0 |
0xFD |
0x20 |
Purpose: This commands the DP5 to clear the MCA (spectrum), and all associated values (see section 4.2.1 for a list of what fields in the status packet are cleared by this command.)
. (slow counts, fast counts, acquisition time, etc.) If the acquisition was enabled when this command was received, it will continue to be enabled after the spectrum is cleared. It also resets the List-mode FIFO to empty.
Response: If no errors are detected, the DP5 will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xF0 |
2 |
0 |
0 |
0xFD |
0x1F |
Purpose: This commands the DP5 to enable the MCA. If the acquisition was stopped due to a “Disable MCA/MCS” command or because the ‘Preset Time’ expired, this command will re-enable the acquisition, without clearing anything. If the acquisition was stopped due to ‘Preset Counts’ being reached, then this command will have no effect until the spectrum is cleared. (See ASCII Commands PREC & PRET.)
Response: If no errors are detected, the DP5 will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xF0 |
3 |
0 |
0 |
0xFD |
0x1E |
Purpose: This commands the DP5 to disable the MCA, effectively pausing the acquisition.
Response: If no errors are detected, the DP5 will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xF0 |
4 |
0 |
0 |
0xFD |
0x1D |
Purpose: This commands the DP5 to arm its internal digital oscilloscope. Once armed, a trigger condition will cause the digital scope to capture 2048 samples. After arming the digital scope, the application software can either:
Monitor the ‘Oscilloscope data ready’ bit (offset 35: bit D2 in the status data) to determine when the scope has triggered, then send a “Request Digital Scope Data” request packet to get the data.
Repeatedly send a
“Request Digital Scope Data” request packet – the
DP5 will respond with a “Scope data not available” ACK
packet if the trigger hasn’t occurred yet. It will respond
with the “2048-byte scope packet” or “2048-byte
scope packet w/ overflow” after the scope has triggered.
(See
the DACO, SCOE, SCOT & SCOG ASCII commands for more information
on the Digital Scope.)
Response: If no errors are detected, the DP5 will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xF0 |
5 |
0 |
0 |
0xFD |
0x1C |
Purpose: This commands the DP5 to search for an appropriate input offset (i.e. the DC offset of the input signal as seen by the input ADC.) Generally, the ‘default’ input offset should work with most detectors. (See the INOF ASCII command.) In order for the Autoset Input Offset function to work properly:
The input polarity must be set properly (see the AINP ASCII command.)
HV & detector temperature (if applicable) must be reasonably stable.
An appropriate input offset might not be found if this command is initiated while the input count rate is high.
Support: This request is supported by the DP5 and PX5, but not the DP5G. (The DP5G does not have a variable input offset.)
Response: If no errors are detected, the DP5 will respond with ACK OK packet. The DP5 sends the ACK packet immediately, and does not wait for the Autoset function to complete. The result of this command is in the status data (offset 36: bit D7) – it returns “Auto Input Offset locked” or “Auto Input Offset searching”. Status can be polled until the result indicates ‘locked’.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xF0 |
6 |
0 |
0 |
0xFD |
0x1B |
Purpose: This commands the DP5 to search for an appropriate fast threshold setting. In order for the Autoset Fast Threshold function to work properly, no input counts can be present (other than noise.)
Response: If no errors are detected, the DP5 will respond with ACK OK packet. The DP5 sends the ACK packet immediately, and does not wait for the Autoset function to complete. The result of this command is in the status data (offset 35: bit D6) – it returns “Auto Fast Threshold not locked” or “Auto Fast Threshold locked”. Status can be polled until the result indicates ‘locked’. The fast threshold determined by this function is returned by the readback of the ‘THFA’ command, using the ‘Text Configuration Readback’ Request Packet. Note that this setting is overwritten when a new configuration packet is received with the “THFA” or “RESC” commands.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Value |
0xF5 |
0xFA |
0xF0 |
8 |
0 |
1 |
IO3…IO0 |
varies |
|
Purpose: This commands the DP5 to set the four IO lines IO3-0 with the data byte in offset 6, as shown below. Note that these outputs are open-drain, with a weak pullup. They can sink 20mA, but only source 100uA (typ) at 3.3V. (These are outputs from a Maxim MAX7328 operating at 3.3V – see the datasheet for more info.)
|
Bit |
Signal |
Connector Location |
|
D7-D4 |
- |
N/A |
|
D3 |
IO3 |
J6.14 (Auxiliary connector) |
|
D2 |
IO2 |
J6.13 (Auxiliary connector) |
|
D1 |
IO1 |
J5.18 (Interconnect connector) |
|
D0 |
IO0 |
J5.17 (Interconnect connector) |
Response: If no errors are detected, the DP5 will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-517 |
518 |
519 |
|
Value |
0xF5 |
0xFA |
0xF0 |
9 |
2 |
0 |
Misc Data |
varies |
|
Purpose: This commands the DP5 to store the 512-byte data field in non-volatile memory. The data can be binary, ASCII, etc. (It could contain the description or location of the unit as an ASCII string, for example.) It is read back with the “Request Misc Data” Request Packet.
Response: If no errors are detected, the DP5 will respond with ACK OK packet. Note this command requires a FLASH memory erase operation – the ACK packet could be delayed as much as 400mS from the request packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-7 |
8 |
9 |
|
Value |
0xF5 |
0xFA |
0xF0 |
0x0A |
0 |
2 |
DCAL LSB, MSB |
varies |
|
Purpose: This commands the DP5 to set the non-volatile calibration value for the detector temperature measurement diode. The setting is an unsigned integer in the range of 0-4095, in the format LSB followed by MSB. The nominal value is 1.000V, which corresponds to a setting of 0x555. (The conversion factor is 732uV/count.) This value can be read back via the “Request Diagnostic Packet” Request Packet. The setting is stored in the DP5 non-volatile memory. If a PC5 is present, it is also stored in the PC5 non-volatile memory.
Support: This request is supported by the DP5 and PX5, but not the DP5G.
Response: If no errors are detected, the DP5 will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Value |
0xF5 |
0xFA |
0xF0 |
0x0B |
0 |
1 |
PZ Corr |
varies |
|
Purpose: This commands the DP5 to set the non-volatile correction factor for the Pole-Zero. This allows digital fine-tuning of the analog PZ time constant. (This calibration value is set at the factory and shouldn’t need to be changed.) This value can be read back via the “Request Diagnostic Packet” Request Packet. The interpretation of the PZ Correction value (‘setting’) is:
Setting of 0-127: the correction factor is (1024+setting)/1024 (i.e. 100% to 112.4%)
Setting of 128-255: the correction factor is (768+setting)/1024 (i.e. 87.5% to 99.9%)
Examples: setting = 0 -> 100% correction factor;
setting =10 ->
101% correction factor;
setting =250-> 99.4% correction factor
The PX5 has two software-selectable pole-zero filters. This command sets the calibration for the 3.2uS pole-zero. The DP5 and DP5G have a single pole-zero; this command sets the calibration for it.
Note: This command won’t take effect until the next configuration request packet is received.
Response: If no errors are detected, the DP5 will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Value |
0xF5 |
0xFA |
0xF0 |
0x0C |
0 |
1 |
uC Temp Cal |
varies |
|
Purpose: This commands the DP5 to set the non-volatile offset calibration for the DP5 temperature measurement. It is an 8-bit signed value, and is added to the measured temperature; the result appears in the status data as ‘board temperature’ (offset 34). This value can be read back via the “Request Diagnostic Packet” Request Packet. [The temperature sensor is internal to the microcontroller; this calibration value allows compensation for the fact that the uC die is always hotter than the board.]
Response: If no errors are detected, the DP5 will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-7 |
8 |
9 |
|
Value |
0xF5 |
0xFA |
0xF0 |
0x0E |
0 |
2 |
Gain, Offset |
varies |
|
Purpose: This commands the DP5 to set the non-volatile gain and offset calibration values for the DP5 ADC. These values can be read back via the “Request Diagnostic Packet” Request Packet.
Gain: If gain setting is 0-127: Correction =
(1024+setting)/1024 (i.e. 100% to 112.4%)
If gain setting is
128-255: Correction = (768+setting)/1024 (i.e. 87.5% to 99.9%)
Offset: The offset setting is a signed byte.
Calibrated ADC Value = (Raw ADC Value * Gain) + Offset.
Note: This command won’t take effect until the next configuration request packet is received.
Response: If no errors are detected, the DP5 will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xF0 |
0x10 |
0 |
0 |
0xFD |
0x11 |
Purpose: This commands the DP5 to clear the General Purpose Counter (“G.P. Counter”). (See the ASCII commands GPIN, GPED, GPME, GPGA and GPMC for more information on the G.P. Counter.)
Response: If no errors are detected, the DP5 will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-24 |
25 |
26 |
|
Value |
0xF5 |
0xFA |
0xF0 |
0x11 |
0 |
0x13 |
Ethernet settings |
varies |
|
Purpose: This commands the DP5 to set the IP address, etc. for the Ethernet controller. The current values can be read back via the “Request Ethernet Settings” Request Packet.
The format of the data field is:
|
Data Offset |
Value |
|
0 |
0 = Use fixed IP address; 0xFF = Get IP address from DHCP server |
|
1-4 |
IP Address (MSB…LSB) |
|
5-8 |
IP Subnet Mask (MSB…LSB) |
|
9-12 |
IP Gateway Address (MSB…LSB) |
|
13-16 |
Reserved |
|
17-18 |
Port (MSB,LSB: fixed at 10001 for FW6.01) |
Response: If no errors are detected, the DP5 will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK. Additionally, if no Ethernet controller is detected on the DP5, the “CP2201 not found” ACK packet will be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Value |
0xF5 |
0xFA |
0xF0 |
0x12 |
0 |
1 |
Time Constant |
varies |
|
Purpose: This selects which high-pass time constant the DP5’s front end is set for. (The time constant is determined by what resistor values are installed – this Request Packet is used to configure the firmware appropriately. The setting is saved in non-volatile memory, so this Request Packet only needs to be sent if the time constant is changed.) This value can be read back via the “Request Diagnostic Packet” Request Packet. The interpretation of the high-pass time constant value (‘setting’) is:
0 => 1.625uS time-constant;
1 => 3.225uS time-constant;
2 => 6.425uS time-constant;
3 => 12.825uS time-constant;
4 => 25.625uS time-constant
The PX5 has two selectable poles – 1.625uS and 3.225uS. This command will switch the appropriate pole into the front end. If >3.225uS is selected, then the PX5 will select the 3.2uS slot – component changes are required to convert that slot to the selected time constant. Contact Amptek for more information.
Note: This command won’t take effect until the next configuration request packet is received.
Response: If no errors are detected, the DP5 will respond with ACK OK packet. If the data byte is outside the range of 0-5, then a BAD PARAMETER error is returned.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Value |
0xF5 |
0xFA |
0xF0 |
0x13 |
0 |
1 |
Baud Rate |
varies |
|
Purpose: This selects the RS232 baud rate. The default is 115,200 baud. 57,600 baud or 19,200 baud can be selected; however, these setting are incompatible with the Ethernet stack. Therefore, selecting 57,600 baud or 19,200 baud will disable the Ethernet interface. When this value is changed, the new setting will not take effect until the next power cycle. The interpretation of the baud rate value (‘setting’) is:
0 => 115,200 baud;
1 => 57,600 baud;
2 => 19,200 baud;
Response: If no errors are detected, the DP5 will respond with ACK OK packet. If the data byte is outside the range of 0-2, then a BAD PARAMETER error is returned.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-7 |
8 |
9 |
|
Value |
0xF5 |
0xFA |
0xF0 |
0x14 |
0 |
2 |
Gain, Offset |
varies |
|
Purpose: This commands the DP5 [PX5] to set the non-volatile gain and offset calibration values for the PC5 [PX5] HV DAC. These values can be read back via the “Request Diagnostic Packet” Request Packet.
Gain: If gain setting is 0-127: Correction =
(1024+setting)/1024 (i.e. 100% to 112.4%)
If gain setting is
128-255: Correction = (768+setting)/1024 (i.e. 87.5% to 99.9%)
Offset: The offset setting is a signed byte, with a scale factor of 366mV/LSB.
Calibrated ADC Value = (Raw ADC Value * Gain) + Offset.
Response: If no errors are detected, the DP5 [PX5] will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Value |
0xF5 |
0xFA |
0xF0 |
0x15 |
0 |
1 |
PZ Corr |
varies |
|
Purpose: The PX5 has two software selectable pole-zero settings; 1.6uS and 3.2uS. This commands the PX5 to set the non-volatile correction factor for the 1.6uS Pole-Zero. This allows digital fine-tuning of the analog PZ time constant. (This calibration value is set at the factory and shouldn’t need to be changed.) This value can be read back via the “Request Diagnostic Packet” Request Packet. The interpretation of the PZ Correction value (‘setting’) is:
Setting of 0-127: the correction factor is (1024+setting)/1024 (i.e. 100% to 112.4%)
Setting of 128-255: the correction factor is (768+setting)/1024 (i.e. 87.5% to 99.9%)
Examples: setting = 0 -> 100% correction factor;
setting =10 ->
101% correction factor;
setting =250-> 99.4% correction factor
Note: This command won’t take effect until the next configuration request packet is received.
Response: If no errors are detected, the PX5 will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xF0 |
0x16 |
0 |
0 |
0xFD |
0x0B |
Purpose: This request packet sets the List-mode timer to zero, and will cause a time-tag event to be written to the List-mode FIFO.
Response: If no errors are detected, the device will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xF0 |
0x20 |
0 |
0 |
0xFD |
0x01 |
Purpose: This Request Packet is used to keep the DP5’s UDP socket bound to the IP address and source port of the computer connected to it. The UDP socket resets itself after 15 seconds of inactivity (after which any IP address can connect to it), so one of the “Interface Keep-alive” Request Packets should be sent periodically if there is no other periodic traffic, or if the periodic traffic is less frequent than ~10 seconds. [If the host wishes to change the Keep-alive status (sharing/no sharing/locked), then a Keep-alive packet should be sent with the new status, even if there is periodic traffic keeping the socket bound.]
The “Allow Sharing” variant of the “Interface Keep-alive” Request Packet tells the DP5 to return the “Sharing Allowed” status in the Netfinder device discovery packet. It also commands the DP5 to accept “Interface Sharing Request” packets on the Netfinder socket, and to return an “Ethernet Sharing Request” ACK packet via the normal UDP socket if such a packet is received. [This ACK packet will replace an OK ACK packet at the next opportunity.]
[As of FW6.01, this Request Packet only applies to Ethernet. In future firmware, it may be expanded to include the other interfaces.]
Response: If no errors are detected, the DP5 will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xF0 |
0x21 |
0 |
0 |
0xFD |
0x00 |
Purpose: This Request Packet is used to keep the DP5’s UDP socket bound to the IP address and source port of the computer connected to it. The UDP socket resets itself after 15 seconds of inactivity (after which any IP address can connect to it), so one of the “Interface Keep-alive” Request Packets should be sent periodically if there is no other periodic traffic, or if the periodic traffic is less frequent than ~10 seconds. [If the host wishes to change the Keep-alive status (sharing/no sharing/locked), then a Keep-alive packet should be sent with the new status, even if there is periodic traffic keeping the socket bound.]
The “No Sharing” variant of the “Interface Keep-alive” Request Packet tells the DP5 to return the “No Sharing” status in the Netfinder device discovery packet. It also commands the DP5 to ignore “Interface Sharing Request” packets on the Netfinder socket.
[As of FW6.01, this Request Packet only applies to Ethernet. In future firmware, it may be expanded to include the other interfaces.]
Response: If no errors are detected, the DP5 will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xF0 |
0x22 |
0 |
0 |
0xFC |
0xFF |
Purpose: This Request Packet is used to keep the DP5’s UDP socket bound to the IP address and source port of the computer connected to it. Normally, the UDP socket resets itself after 15 seconds of inactivity (after which any IP address can connect to it), but it will not automatically reset itself after receiving this Request Packet (so periodic transfers are no longer required to keep the socket bound.) [If the host wishes to change the Keep-alive status (sharing/no sharing/locked), then a Keep-alive packet should be sent with the new status]
The “Lock” variant of the “Interface Keep-alive” Request Packet tells the DP5 to return the “Lock” status in the Netfinder device discovery packet. It also commands the DP5 to ignore “Interface Sharing Request” packets on the Netfinder socket, and to not automatically reset the socket. Care must be taken in using this; the UDP socket binds to the IP Address and source port of the host, so the DP5 will then only communicate with the same IP & source port. The host IP address may change if the host uses a dynamic IP address; the source port may change if the host wishes to communicate with multiple DP5s simultaneously, or doesn’t set the source port explicitly. If the host loses the ability to communicate with the socket, then the power will have to be cycled on the DP5 to reset the socket.
[As of FW6.01, this Request Packet only applies to Ethernet. In future firmware, it may be expanded to include the other interfaces.]
Response: If no errors are detected, the DP5 will respond with ACK OK packet.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of ACK OK.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xF1 |
0..15 |
0 |
0 |
varies |
|
Purpose: This Request Packet is handy for software developers – it requests that a specific ACK packet be returned in response to the request. (It’s useful for testing application error handling – this is much easier than trying to force the various error conditions.) The value of PID2 is used as PID2 in the ACK packet; i.e. sending the Request Packet PID1=0xF1/PID2=4 will yield a ‘Checksum Error” ACK packet (PID1=0xFF/PID2=4).
Response: An ACK packet, with PID2 equal to the PID2 of the Request Packet. This allows all types of ACK packets to be returned.
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of the requested ACK type.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
DATA FIELD |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6…5+LEN |
6+LEN |
7+LEN |
|
Value |
0xF5 |
0xFA |
0xF1 |
0x7F |
varies |
Data to be echoed |
varies |
||
Purpose: This Request Packet is handy for software developers – it requests that the DP5 return a Response Packet, whose length and data field are the same as those of this Request Packet – essentially, it echoes the data field in a Response Packet.
Response: If no errors are detected, the DP5 will respond with “Comm test - Echo packet” Response Packet (PID1=0xF1/PID2=0x7F).
Possible errors: If the request packet is malformed or corrupted: CHKSUM, LEN, or PID error ACK packets can be returned instead of the Response Packet.
|
Description |
Support* |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data (optional) |
|
Status Packet |
ALL |
0x80 |
1 |
0 |
0x40 |
See description |
|
256-channel Spectrum |
ALL |
0x81 |
1 |
0x03 |
0 |
See description |
|
256-channel Spectrum + status |
ALL |
0x81 |
2 |
0x03 |
0x40 |
See description |
|
512-channel Spectrum |
ALL |
0x81 |
3 |
0x06 |
0 |
See description |
|
512-channel Spectrum + status |
ALL |
0x81 |
4 |
0x06 |
0x40 |
See description |
|
1024-channel Spectrum |
ALL |
0x81 |
5 |
0x0C |
0 |
See description |
|
1024-channel Spectrum + status |
ALL |
0x81 |
6 |
0x0C |
0x40 |
See description |
|
2048-channel Spectrum |
ALL |
0x81 |
7 |
0x18 |
0 |
See description |
|
2048-channel Spectrum + status |
ALL |
0x81 |
8 |
0x18 |
0x40 |
See description |
|
4096-channel Spectrum |
ALL |
0x81 |
9 |
0x30 |
0 |
See description |
|
4096-channel Spectrum + status |
ALL |
0x81 |
0x0A |
0x30 |
0x40 |
See description |
|
8192-channel Spectrum |
ALL |
0x81 |
0x0B |
0x60 |
0 |
See description |
|
8192-channel Spectrum + status |
ALL |
0x81 |
0x0C |
0x60 |
0x40 |
See description |
|
2048-byte scope packet |
ALL |
0x82 |
1 |
8 |
0 |
See description |
|
512-byte misc data packet |
ALL |
0x82 |
2 |
2 |
0 |
See description |
|
2048-byte scope packet w/ overflow |
ALL |
0x82 |
3 |
8 |
0 |
See description |
|
Ethernet settings |
ALL |
0x82 |
4 |
0 |
0x17 |
See description |
|
Diagnostic data |
ALL |
0x82 |
5 |
1 |
0 |
See description |
|
Configuration readback packet |
6.01 |
0x82 |
7 |
varies |
|
|
|
Netfinder packet |
6.01 |
0x82 |
8 |
varies |
|
|
|
I2C Read Data |
6.01 |
0x82 |
9 |
varies |
See description |
|
|
List-mode data |
6.06.05 |
0x82 |
0x0A |
varies |
See description |
|
|
List-mode data, FIFO full |
6.06.05 |
0x82 |
0x0B |
varies |
See description |
|
|
MCA8000D calibration packet |
6.07.02; M |
0x82 |
0x0C |
0 |
9 |
See description |
|
64-byte SCA packet |
ALL |
0x83 |
1 |
0 |
0x40 |
See description |
|
Comm test - Echo packet |
ALL |
0x8F |
0x7F |
varies |
Echo data |
|
|
|
* Initial firmware release which supports this packet type |
|||||
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-69 |
70 |
71 |
|
Value |
0xF5 |
0xFA |
0x80 |
1 |
0 |
0x40 |
Status data |
varies |
|
Purpose: This response packet is returned in response to a ‘Request Status Packet’ Request Packet.
Data Format: The data field contains 64 bytes of status data. The format is given below. (This format also applies to the 64-byte status field in the “Spectrum plus Status” Response Packets.)
Note: Values in italics are cleared or zeroed by the ‘Clear Spectrum’, ‘Request and clear Spectrum’, and ‘Request and clear Spectrum plus Status’ request packets.
|
Offset |
Data bits |
Allowed value |
Description |
Notes |
|
0 |
D7-D0 |
0-255 |
Fast count LSB |
|
|
1 |
D7-D0 |
0-255 |
Fast count byte 2 |
|
|
2 |
D7-D0 |
0-255 |
Fast count byte 3 |
|
|
3 |
D7-D0 |
0-255 |
Fast count MSB |
|
|
4 |
D7-D0 |
0-255 |
Slow count LSB |
‘Slow counts’ are counts from the slow (shaped) channel. Any event that is counted in the spectrum is also counted here. |
|
5 |
D7-D0 |
0-255 |
Slow count byte 2 |
|
|
6 |
D7-D0 |
0-255 |
Slow count byte 3 |
|
|
7 |
D7-D0 |
0-255 |
Slow count MSB |
|
|
8 |
D7-D0 |
0-255 |
General Purpose Counter LSB |
The G.P. Counter can be configured to count a number of different events. |
|
9 |
D7-D0 |
0-255 |
G. P. Counter byte 2 |
|
|
10 |
D7-D0 |
0-255 |
G. P. Counter byte 3 |
|
|
11 |
D7-D0 |
0-255 |
G. P. Counter MSB |
|
|
12 |
D7-D0 |
0-99 |
Acc. Time (0-99, 1mS/count) |
|
|
13 |
D7-D0 |
0-255 |
Acc. Time LSB, 100mS/count |
|
|
14 |
D7-D0 |
0-255 |
Acc. Time byte 2 |
|
|
15 |
D7-D0 |
0-255 |
Acc. Time MSB |
|
|
16 |
D7-D0 |
0-255 |
TBD |
Formerly ‘Livetime’ - under development MCA8000D: Livetime (same encoding as Realtime, below) |
|
17 |
D7-D0 |
0-255 |
TBD |
|
|
18 |
D7-D0 |
0-255 |
TBD |
|
|
19 |
D7-D0 |
0-255 |
TBD |
|
|
20 |
D7-D0 |
0-255 |
Realtime LSB (1mS/count) |
FW6.01 and later |
|
21 |
D7-D0 |
0-255 |
Realtime byte 2 |
|
|
22 |
D7-D0 |
0-255 |
Realtime byte 3 |
|
|
23 |
D7-D0 |
0-255 |
Realtime MSB |
|
|
24 |
D7-D4 |
6-15 |
Firmware version, major |
|
|
|
D3-D0 |
0-15 |
Firmware version, minor |
|
|
25 |
D7-D4 |
5-15 |
FPGA version, major |
|
|
|
D3-D0 |
0-15 |
FPGA version, minor |
|
|
26 |
D7-D0 |
0-255 |
Serial Number LSB |
|
|
27 |
D7-D0 |
0-255 |
Serial Number byte 2 |
|
|
28 |
D7-D0 |
0-255 |
Serial Number byte 3 |
|
|
29 |
D7-D0 |
0-255 |
Serial Number MSB |
|
|
30 |
D7-D0 |
0-255 |
HV MSB |
DP5G: N/A |
|
31 |
D7-D0 |
0-255 |
HV LSB (signed integer, 0.5V/count) |
|
|
32 |
D7-D4 |
0 |
(unused) |
|
|
|
D3-D0 |
0-15 |
Detector temperature MSB |
DP5G: N/A |
|
33 |
D7-D0 |
0-255 |
Detector temperature LSB (0.1 degree Kelvin/count) |
|
|
34 |
D7-D0 |
-128…+127 |
Board temp (1 °C/count, signed) |
|
|
35 |
D7 |
0 |
Preset real time not reached (or not enabled) |
|
|
|
|
1 |
Preset real time reached, MCA stopped |
|
|
|
D6 |
0 |
Auto Fast Threshold not locked |
MCA8000D: 0=Preset Livetime not reached (or not enabled); 1=Preset Livetime reached, MCA stopped |
|
|
|
1 |
Auto Fast Threshold locked |
|
|
|
D5 |
0 |
MCA disabled |
|
|
|
|
1 |
MCA enabled |
|
|
|
D4 |
0 |
Preset count not reached |
|
|
|
|
1 |
Preset Count reached, MCA stopped |
|
|
|
D3 |
0 |
GATE is enabled and is active (stopping events)TBD (PS status?) |
FW6.06.07 and later |
|
|
|
1 |
GATE
is disabled or |
|
|
|
D2 |
0 |
Oscilloscope data not ready |
|
|
|
|
1 |
Oscilloscope data ready |
|
|
|
D1 |
0 |
Unit has not been configured |
|
|
|
|
1 |
Unit is configured |
|
|
|
D0 |
0 |
TBD |
|
|
36 |
D7 |
0 |
Auto Input Offset locked |
|
|
|
|
1 |
Auto Input Offset searching |
|
|
|
D6 |
0 |
MCS not finished |
|
|
|
|
1 |
MCS finished |
|
|
|
D5 |
0 |
No reboot |
FW6.05 and later |
|
|
|
1 |
This is first status packet since reboot occurred |
|
|
|
D4-D2 |
0 |
TBD |
|
|
|
D1 |
0 |
FPGA clock = 20MHz |
(formerly status of MCA RAM test, which is now in Diagnostic Packet) |
|
|
|
1 |
FPGA clock = 80MHz |
|
|
|
D0 |
0 |
FPGA clock was explicitly set with ‘CLCK=20’ or ‘CLCK=80’ |
|
|
|
|
1 |
’CLCK=AUTO’ was used to select FPGA clock |
|
|
37 |
D7-D4 |
0 |
TBD |
|
|
|
D3-D0 |
0-15 |
Firmware Build Number |
FW6.06 and later |
|
38 |
D7 |
0 |
PC5 not detected at power-up |
DP5G: PC5G not detected PX5: HV Jumper error |
|
|
|
1 |
PC5 detected at power-up |
DP5G: PC5G detected PX5: Normal |
|
|
D6 |
0 |
PC5/PX5 HV polarity = negative |
DP5G: N/A |
|
|
|
1 |
PC5/PX5 HV polarity = positive |
DP5G: N/A |
|
|
D5 |
0 |
PC5/PX5 preamp supply = +/- 5V |
DP5G: N/A |
|
|
|
1 |
PC5/PX5 preamp supply = +/- 8.5V |
DP5G: N/A |
|
|
D4-D0 |
0 |
TBD |
|
|
39 |
D7-D0 |
0 |
Device ID: DP5 |
|
|
|
|
1 |
Device ID: PX5 |
|
|
|
|
2 |
Device ID: DP5G |
|
|
|
|
3 |
Device ID: MCA8000D |
|
|
40 |
D7-D0 |
0-15 |
PX5 TEC voltage, MSB |
TEC (V) = (MSB*256 + LSB) / 758.5 |
|
41 |
D7-D0 |
0-255 |
PX5 TEC voltage, LSB |
|
|
42 |
D7-D0D6 |
0 |
TBDPX5: no options installed |
|
|
|
D5 |
0 |
HV inhibited |
These only apply if D3-D0 non-zero (i.e. a PX5 option is installed). Otherwise, both bits are zero. |
|
|
|
1 |
HV not inhibited |
|
|
|
D4 |
0 |
Active-low inhibit selected |
|
|
|
|
1 |
Active-high inhibit selected |
|
|
|
D3-D0 |
0 |
PX5: no options installed |
|
|
|
|
1 |
PX5: HPGe HVPS installed |
|
|
|
|
2-15 |
TBD |
|
|
42 |
D7-D4 |
0 |
TBD |
|
|
|
D3-D0 |
0 |
No MCA8000D options |
|
|
|
|
1 |
MCA8000D option ‘PA’ calibration available |
|
|
42 |
D7-D0 |
0 |
TBD |
|
|
|
|
|
|
|
|
43 |
D7-D3 |
0 |
TBD |
|
|
|
D2 |
0 |
List-mode clock: 100nS |
100uS in ‘NOTIMETAG’ mode |
|
|
|
1 |
List-mode clock: 1uS |
1mS in ‘NOTIMETAG’ mode |
|
|
D1-D0 |
0 |
List-mode sync: INT |
See ‘SYNC’ command |
|
|
|
1 |
List-mode sync: NOTIMETAG |
[FW6.06.06 and later] |
|
|
|
2 |
List-mode sync: EXT |
|
|
|
|
3 |
List-mode sync: FRAME |
|
|
44 |
D1-D0 |
0-3 |
DP5 AN_IN MSB |
AN_IN(V) = (MSB*256 + LSB) / 419.7
(AN_IN is on J5.11) |
|
45 |
D7-D0 |
0-255 |
DP5 AN_IN LSB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
46-63 |
D7-D0 |
0 |
N/A (Currently unused) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-773 |
774 |
775 |
|
Value |
0xF5 |
0xFA |
0x81 |
0x01 |
3 |
0 |
Spectrum Data |
varies |
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-773 |
774-837 |
838 |
839 |
|
Value |
0xF5 |
0xFA |
0x81 |
0x02 |
3 |
0x40 |
Spectrum Data |
Status Data |
varies |
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-1541 |
1542 |
1543 |
|
Value |
0xF5 |
0xFA |
0x81 |
0x03 |
6 |
0 |
Spectrum Data |
varies |
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-1541 |
1542-1605 |
1606 |
1607 |
|
Value |
0xF5 |
0xFA |
0x81 |
0x04 |
6 |
0x40 |
Spectrum Data |
Status Data |
varies |
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-3077 |
3078 |
3079 |
|
Value |
0xF5 |
0xFA |
0x81 |
0x05 |
0x0C |
0 |
Spectrum Data |
varies |
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-3077 |
3078-3141 |
3142 |
3143 |
|
Value |
0xF5 |
0xFA |
0x81 |
0x06 |
0x0C |
0x40 |
Spectrum Data |
Status Data |
varies |
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-6149 |
6150 |
6151 |
|
Value |
0xF5 |
0xFA |
0x81 |
0x07 |
0x18 |
0 |
Spectrum Data |
varies |
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-6149 |
6150-6213 |
6214 |
6215 |
|
Value |
0xF5 |
0xFA |
0x81 |
0x08 |
0x18 |
0x40 |
Spectrum Data |
Status Data |
varies |
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-12293 |
12294 |
12295 |
|
Value |
0xF5 |
0xFA |
0x81 |
0x09 |
0x30 |
0 |
Spectrum Data |
varies |
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-12293 |
12294-12357 |
12358 |
12359 |
|
Value |
0xF5 |
0xFA |
0x81 |
0x0A |
0x30 |
0x40 |
Spectrum Data |
Status Data |
varies |
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-24581 |
24582 |
24583 |
|
Value |
0xF5 |
0xFA |
0x81 |
0x0B |
0x60 |
0 |
Spectrum Data |
varies |
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-24581 |
24582-24645 |
24646 |
24647 |
|
Value |
0xF5 |
0xFA |
0x81 |
0x0C |
0x60 |
0x40 |
Spectrum Data |
Status Data |
varies |
|
Purpose: These response packets are sent by the DP5 in response to a request for spectrum data – the specific response packet returned depends on how many channels the DP5’s MCA is configured for, and whether the request was for spectrum data only, or spectrum plus status data.
Data Format: Spectrum data is 3 bytes/channel, LSB to MSB, starting with channel 0, up to the maximum channel number. (i.e. in 256 channel mode, the channel data goes from channel 0 to channel 255.) The status data follows the spectrum data in the Response Packet data field and is 64 bytes in length. The format is the same as is specified for the ‘Status’ response packet.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-2053 |
2054 |
2055 |
|
Value |
0xF5 |
0xFA |
0x82 |
1 |
8 |
0 |
Scope data |
Varies |
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-2053 |
2054 |
2055 |
|
Value |
0xF5 |
0xFA |
0x82 |
3 |
8 |
0 |
Scope data |
Varies |
|
Purpose: These response packets are returned in response to a ‘Request Digital Scope Data’ packet (PID1=3, PID2=1). Only one is returned – the second one (PID2=3) is returned if the Scope Gain is set to 4 or 16, and the signal strayed outside the gain range during the scope acquisition. Otherwise, the first one (PID2=1) is returned. In either case, the data is identical. (This second type is used for noise measurements.) [See the ASCII commands DACO, SCOE, SCOT & SCOG for information on configuring the Digital Scope].
Data Format: The data field contains 2048 bytes of scope data, where each byte is a single 8-bit sample from the scope. The Digital Scope captures the most significant 8 bits of digital data that is being output on the output DAC.
The timebase for the scope is dependent on the FPGA clock and the peaking time selected, as listed below. (The timebase listed is the interval between samples.)
|
FPGA Clock=20MHz |
FPGA Clock=80MHz |
||
|
Peaking Time |
Scope Timebase |
Peaking Time |
Scope Timebase |
|
0.800 - 6.40uS |
50nS |
0.200 - 1.600uS |
12.5nS |
|
6.60 - 12.80uS |
100nS |
1.650 - 3.200uS |
25nS |
|
13.20 - 25.60uS |
200nS |
3.30 - 6.40uS |
50nS |
|
26.40 - 51.20uS |
400nS |
6.60 - 12.80uS |
100nS |
|
52.80 - 102.4uS |
800nS |
13.20 - 25.60uS |
200nS |
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-517 |
518 |
519 |
|
Value |
0xF5 |
0xFA |
0x82 |
2 |
2 |
0 |
Misc data |
Varies |
|
Purpose: This response packet is returned in response to a ‘Request Misc Data’ packet (PID1=3, PID2=2). [See the ‘Write Misc Data’ Request Packet for information on writing the Misc Data.]
Data Format: The data field contains 512 bytes, which is the Misc Data programmed via a ‘Write Misc Data’ request packet. The data can be binary, ASCII, etc. This is stored in non-volatile memory, so it remains after the power is cycled.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-30 |
31 |
32 |
|
Value |
0xF5 |
0xFA |
0x82 |
4 |
0 |
0x19 |
Ethernet settings |
Varies |
|
Purpose: This response packet is returned in response to a ‘Request Ethernet Settings’ packet (PID1=3, PID2=4).
Data Format: The data field contains 23 bytes of Ethernet Settings, in the following format:
|
Offset |
Value |
|
0 |
0 = Use fixed IP address; 0xFF = Get IP address from DHCP server |
|
1-4 |
IP Address (MSB…LSB) |
|
5-8 |
IP Subnet Mask (MSB…LSB) |
|
9-12 |
IP Gateway Address (MSB…LSB) |
|
13-16 |
Reserved |
|
17-18 |
Port (MSB,LSB: fixed at 10001 for now) |
|
19-24 |
DP5 MAC Address |
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-261 |
262 |
263 |
|
Value |
0xF5 |
0xFA |
0x82 |
5 |
1 |
0 |
Diagnostic Data |
Varies |
|
Purpose: This response packet is returned in response to a ‘Request Diagnostic Data’ Request Packet (PID1=3, PID2=5).
Data Format: The data field contains 256 bytes of various types of diagnostic data, in the following format: [Note: PX5 & DP5G bytes 5-38 are different!]
|
Offset |
Bits |
Value |
Comment |
|
0 |
D7-D4 |
Firmware (major) |
6.0 for this release |
|
|
D3-D0 |
Firmware (minor) |
|
|
1 |
D7-D4 |
FPGA (major) |
5.07 for this release; 0.0 indicates FPGA didn’t initialize |
|
|
D3-D0 |
FPGA (minor) |
|
|
2-4 |
all |
SRAM error address (MSB…LSB) |
0xFFFFFF indicates no error |
|
DP5, Bytes 5-38 |
|||
|
5 |
D3-D0 |
DP5 board temp (raw), MSB |
Temp(°C) = (MSB*256 + LSB) * 349.7 – 271.3 [Offset 180 is the 8-bit signed offset cal for this] |
|
6 |
D7-D0 |
DP5 board temp (raw), LSB |
|
|
7 |
D7-D0 |
TBD |
|
|
8 |
D7-D0 |
TBD |
|
|
9 |
D1-D0 |
Power Input, MSB |
Input(V) = (MSB*256 + LSB) / 167.5 |
|
10 |
D7-D0 |
Power Input, LSB |
|
|
11 |
D1-D0 |
3.3V supply, MSB |
3.3V(V) = (MSB*256 + LSB) / 254.3 |
|
12 |
D7-D0 |
3.3V supply, LSB |
|
|
13 |
D1-D0 |
2.5V supply, MSB |
2.5V(V) = (MSB*256 + LSB) / 335.7 |
|
14 |
D7-D0 |
2.5V supply, LSB |
|
|
15 |
D1-D0 |
1.2V supply, MSB |
1.2V(V) = (MSB*256 + LSB) / 419.7 |
|
16 |
D7-D0 |
1.2V supply, LSB |
|
|
17 |
D1-D0 |
5.5V supply, MSB |
5.5V(V) = (MSB*256 + LSB) / 150.7 (This is called ‘5.5MON’ and is used in the -5.5V monitor below) |
|
18 |
D7-D0 |
5.5V supply, LSB |
|
|
19 |
D1-D0 |
-5.5V supply, MSB |
-5.5(V) = (MSB*256 +
LSB) / 135.5 |
|
20 |
D7-D0 |
-5.5V supply, LSB |
|
|
21 |
D1-D0 |
AN_IN, MSB |
AN_IN(V) = (MSB*256 + LSB) / 419.7 (AN_IN is on J5.11) |
|
22 |
D7-D0 |
AN_IN, LSB |
|
|
23 |
D1-D0 |
VREF_IN, MSB |
VREF_IN(V) = (MSB*256 + LSB) / 419.7 (VREF_IN is a test point) |
|
24 |
D7-D0 |
VREF_IN, LSB |
|
|
Offsets 25-38 will be zero if a PC5 is not detected |
|||
|
25 |
D3-D0 |
PC5 HV Mon, MSB |
HV (V) = (MSB*256 + LSB) / 2.731 |
|
26 |
D7-D0 |
PC5 HV Mon, LSB |
|
|
27 |
D3-D0 |
PC5 Det Temp, MSB |
Det Temp (K) = (MSB*256 + LSB) / 13.65 |
|
28 |
D7-D0 |
PC5 Det Temp, LSB |
|
|
29 |
D3-D0 |
PC5 +PA supply, MSB |
+PA (V) = (MSB*256 + LSB) / 455.1 |
|
30 |
D7-D0 |
PC5 +PA supply, LSB |
|
|
31-34 |
D7-D0 |
PC5 S/N, LSB…MSB |
|
|
35 |
D3-D0 |
DCAL, MSB |
DCAL (V) = (MSB*256 + LSB) / 1365 |
|
36 |
D7-D0 |
DCAL, LSB |
|
|
37 |
D7 |
PC5 HV polarity |
0 = -HV, 1=+HV |
|
|
D6 |
PC5 PA supply |
0 = 5V preamp, 1 = 8.5V preamp |
|
|
D5-D0 |
N/A |
|
|
38 |
D7-D4 |
N/A |
|
|
|
D3 |
PC5 9V supply |
0 = OFF, 1 = ON |
|
|
D2 |
PC5 preamp supplies |
0 = OFF, 1 = ON |
|
|
D1 |
PC5 HV supply |
0 = OFF, 1 = ON |
|
|
D0 |
PC5 TEC supply |
0 = OFF, 1 = ON |
|
PX5, Bytes 5-38 |
|||
|
5 |
D3-D0 |
9V supply, MSB |
9V (V) = (MSB*256 + LSB) / 304.1 |
|
6 |
D7-D0 |
9V supply, LSB |
|
|
7 |
D7-D0 |
3.3V supply, MSB |
3.3V (V) = (MSB*256 + LSB) / 827.5 |
|
8 |
D7-D0 |
3.3V supply, LSB |
|
|
9 |
D1-D0 |
2.5V supply, MSB |
2.5V (V) = (MSB*256 + LSB) / 1093 |
|
10 |
D7-D0 |
2.5V supply, LSB |
|
|
11 |
D1-D0 |
1.2V supply, MSB |
1.2 (V) = (MSB*256 + LSB) / 1365 |
|
12 |
D7-D0 |
1.2V supply, LSB |
|
|
13 |
D1-D0 |
5V supply, MSB |
5V (V) = (MSB*256 + LSB) / 545 |
|
14 |
D7-D0 |
5V supply, LSB |
|
|
15 |
D1-D0 |
-5V supply, MSB |
-5V (V) = (MSB*256 + LSB) / 170.5 – 21.03 |
|
16 |
D7-D0 |
-5V supply, LSB |
|
|
17 |
D1-D0 |
+PA supply, MSB |
+PA (V) = (MSB*256 + LSB) / 321.6 |
|
18 |
D7-D0 |
+PA supply, LSB |
|
|
19 |
D1-D0 |
-PA supply, MSB |
-PA (V) = (MSB*256 + LSB) / 170.5 – 21.03 |
|
20 |
D7-D0 |
-PA supply, LSB |
|
|
21 |
D1-D0 |
TEC supply, MSB |
TEC (V) = (MSB*256 + LSB) / 758.5 |
|
22 |
D7-D0 |
TEC supply, LSB |
|
|
23 |
D1-D0 |
HV supply, MSB |
HV (V) = (MSB*256 + LSB) / 2.731 |
|
24 |
D7-D0 |
HV supply, LSB |
|
|
25 |
D3-D0 |
Detector Temperature, MSB |
Det Temp (K) = (MSB*256 + LSB) / 13.65 |
|
26 |
D7-D0 |
Detector Temperature, LSB |
|
|
27 |
D1-D0 |
Board temperature (raw), MSB |
Temp(°C) = (MSB*256 + LSB) * 1.024 – 271.3 |
|
28 |
D7-D0 |
Board temperature (raw), LSB |
|
|
29-38 TBD |
|||
|
DP5G Bytes 5-38 |
|||
|
5-38 |
TBD |
|
|
|
Offsets 39-230 contain the Boot Record - Select items are listed below |
|||
|
167-168 |
|
HV setting |
Signed INT, MSB…LSB (in Volts) |
|
169-170 |
|
TEC setting |
Unsigned INT, MSB…LSB (in K) |
|
171-172 |
|
Input Offset |
Signed INT, MSB…LSB (in mV) [-2048 indicates default setting] |
|
173-176 |
|
Preset Time |
Unsigned LONG, MSB…LSB (0.1s/lsb) |
|
177-178 |
|
DP5 DCAL |
Unsigned INT, MSB…LSB (732uV/lsb) [PC5 DCAL takes precedence, if present] |
|
179 |
|
PZ Correction |
See the “Set PZ Correction” Request Packet for definition |
|
180 |
|
uC Temp Calibration |
See the “Set uC Temperature Calibration” Request Packet for definition |
|
181 |
|
ADC Gain Calibration |
See the “Set ADC Calibration” Request Packet for definitions |
|
182 |
|
ADC Offset Calibration |
|
|
187 |
|
Highpass time constant |
See the “Select High-Pass Time Constant” Request Packet for definition |
|
188 [DP5] |
|
RS232 Baud rate |
See the “Select RS232 Baud Rate” Request packet for definition |
|
189 [DP5] 195 [PX5] |
|
HV gain calibration |
See the “Set HV Calibration” Request Packet for definition |
|
190 [DP5] 196 [PX5] |
|
HV offset calibration |
|
|
197 [PX5] |
|
PZ Correction (1.6uS) |
See the “Set 1.6uS PZ Correction” Request Packet for definition |
|
Misc. Diagnostic Data |
|||
|
231 |
D7-D4 |
TBD |
|
|
|
D3-D0 |
Firmware Build # |
Combined with offset 0 for full Firmware Major/Minor/Build version |
|
232-255 |
|
TBD |
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6…5+LEN |
6+LEN |
7+LEN |
|
Value |
0xF5 |
0xFA |
0x82 |
7 |
varies |
Configuration readback (ASCII) |
varies |
||
Purpose: This response packet is returned in response to a ‘Configuration Readback’ Request Packet (PID1=3, PID2=5). The data field contains ASCII commands and parameters, separated by semicolons.
Data Format: The data field will contain the current ASCII configuration – it will have all the commands that were sent with the “Configuration Readback” Request Packet, except the parameters will have been replaced with the actual settings in use by the DP5. See the “Text Configuration” Request Packet, “Configuration Readback” Request packet, and the section on ASCII Commands for more details.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
DATA FIELD |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6…5+LEN |
6+LEN |
7+LEN |
|
Value |
0xF5 |
0xFA |
0x82 |
8 |
varies |
Netfinder data |
varies |
||
Purpose: This is used to return the ‘Netfinder’ packet via the normal communications link. [Normally, the Netfinder data is returned by a dedicated TCP/IP socket.]
Data Format: The data field is formatted the same as an independent Netfinder packet, as documented in section 3.2.4.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
DATA FIELD |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6…5+LEN |
6+LEN |
7+LEN |
|
Value |
0xF5 |
0xFA |
0x82 |
9 |
varies |
I2C read data |
varies |
||
Purpose: This is used to return the data read by the ‘I2C Transfer’ Request Packet. If the Number of Bytes to Read (‘NOBR’) in the ‘I2C Transfer’ Request Packet is nonzero, and the I2C transfer was successful, then the ‘I2C Read Data’ Response Packet is returned, with the data field containing the bytes read by the transfer. [Note that if NOBR = 0, the DP5 will return an ACK OK packet rather than an ‘I2C Read Data’ packet with LEN=0.]
Data Format: The LEN value will be the same as NOBR, and the data field will contain the bytes read, in the order that they were read.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
DATA FIELD |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6…5+LEN |
6+LEN |
7+LEN |
|
Value |
0xF5 |
0xFA |
0x82 |
0x0A |
varies |
List-mode data |
varies |
||
|
Value |
0xF5 |
0xFA |
0x82 |
0x0B |
varies |
List-mode data |
varies |
||
Purpose: This is used to return the data captured by List-mode. Each List-mode event is 16 or 32 bits in size, and the List-mode FIFO can hold 1024 32-bit records or 2048 16-bit records (i.e. 4KB). The LEN of the List-mode data packet can range from 0 (i.e. 0 records; the FIFO is empty) to 4096 (i.e. 1024 32-bit records or 2048 16-bit records; the FIFO is full.)
The two packet types (PID2=)=0x0A/0x0B) return identical data; the PID2=0x0B packet type is returned when the firmware detects that the FIFO was full when the List-mode Request Packet was received (i.e. events were likely lost.) Otherwise, the firmware will return a packet with PID2=0x0A. [The FIFO size may be increased in future FPGA versions; hence, the two different response packets, rather than having the application monitor the returned data size.]
Note that the ‘Buffer Select’ feature (described below) and external sync (see Section 5.1.59) use the same input, so that only one of these features can be used. The other input is reserved for GATE.
Data Format: The data field contains between 0 and 1024 4-byte records, or between 0 and 2048 2-byte records, depending on configuration. Each record can be one of six formats; a 32-bit Event, a 32-bit Timetag, a 32-bit Frame+Timetag, a 16-bit event, a 16-bit Timetag, or a 16-bit null event. (The ‘SYNC’ command determines whether the Timetag or Frame+Timetag record is recorded, and whether 16-bit or 32-bit operation is selected.) The 32-bit (4 byte) or 16-bit (2 byte) record occurs in the packet data field from MSB to LSB. The fields in the record are bit-stuffed; some of them cross byte boundaries.
All records are 32 bits in size in the 32-bit modes (SYNC=INT/EXT/FRAME), or 16 bits in size in the 16-bit mode (SYNC=NOTIMETAG).
Byte 43 of the status packet can be read to determine the current List-mode configuration.
32-bit Event
Record: An ‘event’ is recorded when an input pulse
passes all the acceptance criteria of the MCA; pileup reject (if
enabled), RTD (if enabled), threshold and LLD, presets (if enabled),
MCA enable, Detector Reset Lockout (if enabled), and Gate (if
enabled).
|
D31 |
D30 |
D29-D16 |
D15-D0 |
|
0 |
Buffer Select |
14-bit Amplitude |
16-bit Timetag |
D31=0 indicates that this is an Event Record.
‘Buffer Select’ is the state of an external digital signal:
PX5/DPG/Gammarad: The state of the AUX-1 input, if ‘CON1=AUXIN1’ is commanded;
DP5: The state of the AUXIN2 input.
DPG: The state of the AUX2 input, if ‘CON1=AUXIN1’ is commanded.
14-bit Amplitude: The channel number (0 to 16383) of the event.
16-bit timetag: The least-significant word of the List-mode timer, when the event occurred. 100nS or 1uS per count, depending on configuration. (See ‘CLKL’ command.) This is combined with the most significant bits from the most recent timetag record to determine the time that the event was recorded.
32-bit Timetag: If List-mode was configured with ‘SYNC=INT’ (no external sync) or ‘SYNC=EXT’ (external sync, no frame), then every time the least significant 16 bits of the List-mode timer roll over (or the time is reset by an external sync signal), a Timetag record is recorded. It contains the most significant bits of the timer, so that the full 46 bits of the event time can be reconstructed. The most-significant timer bits of the Timetag record should be used for subsequent events (i.e. they should be combined with the least-significant bits in the Event record), until a new Timetag record appears.
|
D31 |
D30 |
D29-D0 |
|
1 |
0 |
30 MS bits of List-mode timer |
D31=1, D30=0: Indicates this is a Timetag record.
32-bit Frame+Timetag: If List-mode was configured with ‘SYNC=FRAME’, then every time an external sync occurs, a Frame+Timetag record is recorded. The record contains a 16-bit Frame count, and the most-significant 14-bits of the List-mode timer. Only 30 bits of the List-mode timer are utilized in this mode, so the 14 MS bits from the Frame+Timetag record are combined with the 16 LS bits in each Event record to reconstruct the event time.
|
D31 |
D30 |
D29-D14 |
D13-D0 |
|
1 |
1 |
16-bit Frame count |
14-bit Timetag |
D31=1, D30=1: Indicates this is a Frame+Timetag record.
16-bit Frame Count: This is incremented on the rising edge of an external Sync pulse.
16-bit Event
Record: If List-mode was configured with ‘SYNC=NOTIMETAG’
, then a 16-bit ‘event’ is recorded when an input pulse
passes all the acceptance criteria of the MCA; pileup reject (if
enabled), RTD (if enabled), threshold and LLD, presets (if enabled),
MCA enable, Detector Reset Lockout (if enabled), and Gate (if
enabled).
|
D15 |
D14 |
D13-D0 |
|
0 |
Buffer Select |
14-bit Amplitude |
D15=0 indicates that this is an Event Record.
‘Buffer Select’ is the state of an external digital signal:
PX5/DPG/Gammarad: The state of the AUX-1 input, if ‘CON1=AUXIN1’ is commanded;
DP5: The state of the AUXIN2 input.
DPG: The state of the AUX2 input, if ‘CON1=AUXIN1’ is commanded.
14-bit Amplitude: The channel number (0 to 16383) of the event.
16-bit Timetag: If List-mode was configured with ‘SYNC=NOTIMETAG’ (16-bit mode), then there is no timetag attached to each event record, as there is in other SYNC modes. A timetag record is inserted in the data stream every 100uS or 1mS, depending on CLKL configuration.
|
D15 |
D14-D0 |
|
1 |
15 bit List-mode timer |
D15=1: Indicates this is a Timetag record.
15 bit List-mode timer: The record is inserted every 100uS/1mS, and the 15-bit count is incremented each time. All events recorded between two timetags occurred in the 100uS/1mS interval between them.
16-bit Null Event: Because the List-mode FIFO is 32 bits wide, occasionally 16 bits of padding are required when a single 16-bit timetag is recorded. The ‘Null Event’ is 16 bits of zeroes, and should be discarded when interpreting the data stream.
The List-mode logic combines a 16-bit timetag and 16-bit event whenever possible; at high rates, there should be few Null Events in the data stream. However, with no input counts, each timetag will have a corresponding Null Event in the data stream.
|
D15-D0 |
|
0x0000 |
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-22 |
23 |
24 |
|
Value |
0xF5 |
0xFA |
0x82 |
0x0C |
0 |
9 |
Calibration data |
Varies |
|
Purpose: This response packet is returned in response to a ‘Request Option PA Calibration’ Request Packet (PID1=3, PID2=0x0A.)
Data Format: The data field contains 17 bytes The format for the data field is given below:
|
Offset |
Value |
|
0 |
Calibration format 1 = Option PA |
|
|
Scale=1V, point #1 |
|
1-2 |
mV (1 LSB=100uV); MSB, LSB |
|
3-4 |
Channel number; MSB, LSB |
|
|
Scale=1V, point #2 |
|
5-6 |
mV (1 LSB=100uV); MSB, LSB |
|
7-8 |
Channel number; MSB, LSB |
|
|
Scale=10V, point #1 |
|
9-10 |
mV (1 LSB=1mV); MSB, LSB |
|
11-12 |
Channel number; MSB, LSB |
|
|
Scale=10V, point #2 |
|
13-14 |
mV (1 LSB=1mV); MSB, LSB |
|
15-16 |
Channel number; MSB, LSB |
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data Field |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6-69 |
70 |
71 |
|
Value |
0xF5 |
0xFA |
0x83 |
1 |
0 |
0x40 |
SCA data |
Varies |
|
Purpose: This response packet is returned in response to a ‘Request 32-bit SCA counters’ Request Packet (PID1=4, PID2=1, 2 or 3.)
Data Format: The data field contains 64 bytes, which are read from the 32-bit SCA counter latches (i.e. there are 4 bytes per SCA counter.) The format for the data field is given below:
|
Offset |
Value |
|
0-3 |
SCA1 counter (LSB…MSB) |
|
4-7 |
SCA2 counter (LSB…MSB) |
|
8-11 |
SCA3 counter (LSB…MSB) |
|
12-15 |
SCA4 counter (LSB…MSB) |
|
16-19 |
SCA5 counter (LSB…MSB) |
|
20-23 |
SCA6 counter (LSB…MSB) |
|
24-27 |
SCA7 counter (LSB…MSB) |
|
28-31 |
SCA8 counter (LSB…MSB) |
|
32-35 |
SCA9 counter (LSB…MSB) |
|
36-39 |
SCA10 counter (LSB…MSB) |
|
40-43 |
SCA11 counter (LSB…MSB) |
|
44-47 |
SCA12 counter (LSB…MSB) |
|
48-51 |
SCA13 counter (LSB…MSB) |
|
52-55 |
SCA14 counter (LSB…MSB) |
|
56-59 |
SCA15 counter (LSB…MSB) |
|
60-63 |
SCA16 counter (LSB…MSB) |
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
DATA FIELD |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6…5+LEN |
6+LEN |
7+LEN |
|
Value |
0xF5 |
0xFA |
0x8F |
0x7F |
varies |
Echo data |
varies |
||
Purpose: This Response Packet is sent in response to the Request Packet of the same name. The LEN & DATA fields are the same as in the Request Packet.
Data Format: Whatever data is in the data field of the Request Packet is copied, byte-for-byte, into the data field of the Response packet.
|
Description |
Support* |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
Data (optional) |
|
OK |
ALL |
0xFF |
0 |
0 |
0 |
|
|
Sync error |
ALL |
0xFF |
1 |
0 |
0 |
|
|
PID error |
ALL |
0xFF |
2 |
0 |
0 |
|
|
LEN error |
ALL |
0xFF |
3 |
0 |
0 |
|
|
Checksum error |
ALL |
0xFF |
4 |
0 |
0 |
|
|
Bad parameter |
ALL |
0xFF |
5 |
varies |
ASCII command |
|
|
Bad hex record (structure/chksum) |
ALL |
0xFF |
6 |
0 |
0 |
|
|
Unrecognized command |
ALL |
0xFF |
7 |
varies |
ASCII command |
|
|
FPGA error (not initialized) |
ALL |
0xFF |
8 |
0 |
0 |
|
|
CP2201 not found |
ALL |
0xFF |
9 |
0 |
0 |
|
|
Scope data not available (not triggered) |
ALL |
0xFF |
0x0A |
0 |
0 |
|
|
PC5 not present |
ALL |
0xFF |
0x0B |
varies |
ASCII command |
|
|
OK + Interface sharing request |
ALL |
0xFF |
0x0C |
0 |
0 |
|
|
Busy - another interface is in use |
|
0xFF |
0x0D |
0 |
0 |
|
|
I2C error |
6.01 |
0xFF |
0x0E |
0 |
0 |
|
|
OK + FPGA upload address |
6.06.04 |
0xFF |
0x0F |
0 |
3 |
Intel hex record: ADDR MSB, LSB, record type |
|
Feature not supported by this FPGA version |
6.06.05 |
0xFF |
0x10 |
0 |
0 |
|
|
Calibration data not present |
6.07.02 |
0xFF |
0x11 |
0 |
0 |
|
|
|
* Initial firmware release which supports this packet type |
|||||
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xFF |
0 |
0 |
0 |
0xFD |
0x12 |
Purpose: This ACK packet indicates that the Request Packet was received without error, that its contents were recognized, and that the requested action was carried out. This ACK packet is only returned by Request Packets which do not request data.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xFF |
0x0C |
0 |
0 |
0xFD |
0x06 |
Purpose: This ACK packet has the same meaning as the “OK” ACK packet. In addition, another computer or interface is requesting that activity be paused so that it can gain access to the DP5. To allow it access, the application should stop sending traffic to the DP5. To maintain control (and deny it access), continue sending Request Packets. (Send ‘Interface keep-alive’ packets periodically, if no other periodic traffic is occurring. See the Interface section for more details.)
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xFF |
1 |
0 |
0 |
0xFD |
0x11 |
Purpose: This ACK packet indicates that the sync bytes in Request Packet were not correct, and therefore, the Request Packet was rejected.
Note: This error condition can only be generated via USB or Ethernet; RS232 uses the sync bytes to locate a packet in the RS232 data stream. In the absence of the sync byte pattern, no Request Packet is detected and thus no ACK packet can be returned.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xFF |
2 |
0 |
0 |
0xFD |
0x10 |
Purpose: This ACK packet indicates that PID1 & PID2 combination is not recognized as a valid Request Packet, and therefore, the Request Packet was rejected.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xFF |
3 |
0 |
0 |
0xFD |
0x0F |
Purpose: This ACK packet indicates that the LEN field of the Request Packet was not consistent with Request Packet type defined by the PID1 & PID2 combination. It is not recognized as a valid Request Packet, and therefore, the Request Packet was rejected.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xFF |
4 |
0 |
0 |
0xFD |
0x0E |
Purpose: This ACK packet indicates that the checksum of the Request Packet was incorrect, and therefore, the Request Packet was rejected.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
DATA |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6...5+LEN |
6+LEN |
7+LEN |
|
Value |
0xF5 |
0xFA |
0xFF |
5 |
0 |
varies |
ASCII Command Echo |
varies |
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
DATA |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6...5+LEN |
6+LEN |
7+LEN |
|
Value |
0xF5 |
0xFA |
0xFF |
7 |
0 |
varies |
ASCII Command Echo |
varies |
|
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
DATA |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6...5+LEN |
6+LEN |
7+LEN |
|
Value |
0xF5 |
0xFA |
0xFF |
0x0B |
0 |
varies |
ASCII Command Echo |
varies |
|
Purpose: These ACK packets are in response to ASCII command errors – the data field will contain the ASCII command and parameter which caused the error. “Bad Parameter” means that the parameter isn’t recognized or exceeds the range of the command. “Unrecognized Command” means that the 4-character command isn’t recognized. “PC5 Not Present” is returned if a PC5 is not mated to the DP5, and a command requiring a PC5 is sent. (i.e. “HVSE”, Set High Voltage.) [A ‘Bad Parameter’ ACK packet may also be returned for a malformed I2C Request Packet, in which case LEN=0.]
If an incomplete or garbled command is returned in the data field, it may mean that the ASCII Configuration Packet has structural issues. (Disallowed whitespace, missing semicolon, etc.)
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xFF |
6 |
0 |
0 |
0xFD |
0x0C |
Purpose: This ACK packet applies to microcontroller or FPGA upload packets (PID1=0x30, PID2=2 or 7.) It means that the hex record contained in the data field of the Request Packet had a checksum or other structural error.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xFF |
8 |
0 |
0 |
0xFD |
0x0A |
Purpose: This ACK packet indicates that the FPGA failed initialization, and is returned in response to “Request Spectrum” (PID1=2) packets.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xFF |
9 |
0 |
0 |
0xFD |
0x09 |
Purpose: This ACK packet indicates that the “Set Ethernet Settings” (PID1=0xF0, PID2=0x11) was received, but an Ethernet controller was not detected on the DP5. [Some early DP5s were manufactured without an Ethernet controller.]
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xFF |
0x0A |
0 |
0 |
0xFD |
0x08 |
Purpose: This ACK packet indicates that a “Send Scope Data” (PID1=3, PID2=1 or 3) was received, but the digital oscilloscope hasn’t triggered, so no data is available. [The digital oscilloscope must be armed, and then a trigger must occur for data to be available.]
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xFF |
0x0E |
0 |
0 |
0xFD |
0x04 |
Purpose: This ACK packet indicates that the I2C Bus Master attempted a transfer as described by the ‘I2C Transfer’ Request Packet, but no I2C ACK was detected from an I2C Slave.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xFF |
0x10 |
0 |
0 |
0xFD |
0x02 |
Purpose: This ACK packet indicates that a Request Packet has been recognized as valid by the firmware, but it is not supported by the installed FPGA version. Update the FPGA to the latest FP version.
|
|
SYNC1 |
SYNC2 |
PID1 |
PID2 |
LEN MSB |
LEN LSB |
CHKSUM MSB |
CHKSUM LSB |
|
Offset |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Value |
0xF5 |
0xFA |
0xFF |
0x11 |
0 |
0 |
0xFD |
0x01 |
Purpose: This ACK packet indicates that a Request Packet has been recognized as valid by the firmware, but that the requested calibration data has not been previously programmed into the device.
In the following section, the format is specified for all the ASCII commands recognized by the DP5. These commands are sent to the DP5 in the ‘Text Configuration’ Request Packet (PID1=0x20, PID2=2). The commands can be sent singly, but most often, they are grouped together into a single Text Configuration packet so that the entire configuration can be sent at once.
Generally, when the entire configuration is sent at once, the first command should be “RESC=Y”. This resets the configuration to a known state before applying the configuration commands. This is not automatically done because it may be possible that the required configuration is larger than can be sent in a single ‘Text Configuration’ Request Packet. If this is the case, then “RESC=Y” and as many commands as will fit should be sent in the first Text Configuration packet, with the remaining commands in later packets. Also, it may be desirable to send individual commands to fine-tune the configuration.
This is discussed in the ‘Text Configuration’ Request Packet definition, but it’s worth mentioning again: all ASCII characters must be upper-case; no whitespace is allowed (i.e. no spaces, tabs, CR-LF, etc.); and the commands are separated by semicolons.
Some commands have dependencies; they require other commands to be listed before them. For example, the Peaking Time command (TPEA) needs to know what FPGA clock to use, so it requires the FPGA Clock (CLCK) command to be listed before it. Likewise, many commands are dependent on the TPEA command, so it must precede them. If a dependent command is specified, that command must occur prior to the command which lists the dependency. The table below specifies the ‘Order’ for each command – lower Order commands must be sent before higher Order commands.
|
Support* |
Command |
Parameter |
Units |
Default |
ORDER |
Limits |
|
|
ACK / Don't ACK packets with errors |
|
ACKE |
[ON|OF{F}] |
|
|
|
|
|
Analog input pos/neg |
ALL |
AINP |
[PO{S}|NE{G}] |
|
NEG |
|
|
|
AUX_OUT selection |
ALL |
AUO1 |
[#|ICR|PILEUP|MCSTB| ONESH|DETRES|MCAEN| PEAKH|SCA8] |
|
ICR |
|
1-8 or the exact strings listed |
|
AUX_OUT2 selection |
ALL |
AUO2 |
[#|ICR|DIAG|PEAKH| ONESH|RTDOS| RTDREJ|LIVE|VETO| STREAM] |
|
ICR |
|
1-9 or the exact strings listed |
|
BLR down correction |
ALL |
BLRD |
[#] |
|
0 |
|
0-3 |
|
BLR mode |
ALL |
BLRM |
[OF{F}|1] |
|
OFF |
|
only '1' for now |
|
BLR up correction |
ALL |
BLRU |
[#] |
|
0 |
|
0-3 |
|
Turn supplies on/off at power up |
ALL; D |
BOOT |
[ON|OF{F}] |
|
|
|
|
|
Select Connector 1 signal |
6.03; P, G |
CON1 |
[DAC|AUXOUT1| AUXIN1] |
|
AUXIN1 (DP5G); DAC (PX5) |
|
|
|
Select Connector 2 signal |
6.03; P, G |
CON2 |
[AUXOUT2|AUXIN2 GATEH|GATEL] |
|
AUXIN2 (DP5G); AUXOUT2 (PX5) |
|
|
|
20MHz/80MHz |
ALL |
CLCK |
[AU{TO}|20|80] |
|
AUTO [‘20’ for DP5G] |
2 |
|
|
List-mode clock |
6.06.05 |
CLKL |
[100|1000] |
[NS] |
100 |
|
|
|
Non-trapezoidal shaping |
ALL |
CUSP |
[OFF|##] |
|
0% (trapezoid) |
|
-99 to +99% (0%=trapezoid) |
|
DAC offset |
ALL |
DACF |
[{-}###] |
[MV] |
0mV |
|
-500 to +499mV |
|
DAC output |
ALL |
DACO |
[#|OFF|FAST|SHAPED |INPUT| PEAK] |
|
OFF |
|
1-8 |
|
Analog gain index |
ALL |
GAIA |
[##] |
|
|
|
DP5: 1-16 PX5: 1-28 DP5G: 1-4 |
|
Fine gain |
ALL |
GAIF |
[##.####] |
|
|
4 |
0.5-1.9999 |
|
Total Gain (analog * fine) |
ALL |
GAIN |
[###.###] |
|
|
4 |
DP5: 0.75-150 PX5: 0.75-500 DP5: 1-10 |
|
Gate control |
ALL; D |
GATE |
[OF{F}|HI{GH}|LO{W}] |
|
OFF |
|
|
|
G.P. counter edge |
ALL |
GPED |
[RI{SING}|FA{LLING}] |
|
FALLING |
|
|
|
G.P. counter uses GATE |
ALL |
GPGA |
[ON|OF{F}] |
|
ON |
|
|
|
G.P. counter input |
ALL |
GPIN |
[#|AUX1|AUX2|PILEUP| RTDREJ|SCA8|TBD| DETRES|OFF] |
|
AUX1 |
|
1-8 |
|
G.P. counter cleared with MCA counters? |
ALL |
GPMC |
[ON|OF{F}] |
|
ON |
|
|
|
G.P. counter uses MCA_EN? |
ALL |
GPME |
[ON|OF{F}] |
|
ON |
|
|
|
HV set |
ALL |
HVSE |
[{+|-}####|OF{F}] |
[V] |
OFF |
|
0 to 1499V (+HV); 0 to -1499V (-HV) |
|
Input offset |
ALL; D, P |
INOF |
[{+|-}####|AU{TO}|DE{F}] |
[MV] |
DEF |
AINP (for DEF) |
-2047 to +2047mV |
|
Input offset gain |
6.06; P |
INOG |
[LO{W}|HI{GH}| |
|
LOW |
|
|
|
MCA/MCS channels |
ALL |
MCAC |
[256|512|1024|2048| 4096|8192] |
|
1024 |
|
|
|
MCA/MCS enable |
ALL |
MCAE |
[ON|OF{F}] |
|
OFF (disabled) |
|
|
|
MCA Source |
ALL |
MCAS |
[NO{RM}|MC{S}|FA{ST}| PU{R}|RT{D}] |
|
NORM |
6 |
|
|
MCS low threshold |
6.01 |
MCSL |
[####] |
[CH] |
0 |
|
0-8191 |
|
MCS high threshold |
6.01 |
MCSH |
[####] |
[CH] |
8191 |
|
0-8191 |
|
MCS timebase |
ALL |
MCST |
[###.###] |
[S] |
0 |
|
0.01-655.35S |
|
preamp 8.5/5 |
ALL; D, P |
PAPS |
DP5: [8{.5}|5|OF{F}|ON] PX5: [8{.5}|5|OF{F}] |
[V] |
OFF |
|
|
|
Preamp pole-zero cancellation |
6.05; P |
PAPZ |
[####.#|OFF] |
[US] |
OFF |
|
34.5-4387uS |
|
Peak detect mode (min/max) |
D,P,G |
PDMD |
[NORM|MIN] |
|
NORM |
|
|
|
Peak detect mode |
M |
PDMD |
[NORM|MIN|ABS|CLK|INT] |
|
NORM |
|
|
|
Preset counts, low threshold |
6.01 |
PRCL |
[####] |
[CH] |
0 |
|
0-8191 |
|
Preset counts, high threshold |
6.01 |
PRCH |
[####] |
[CH] |
8191 |
|
0-8191 |
|
Preset counts |
ALL |
PREC |
[##########|OF{F}] |
|
OFF |
|
0-4294967295 (2^32 -1) |
|
Preset Livetime |
6.07.00; M |
PREL |
[########.###|OF{F}] |
|
OFF |
|
0 – 4,294,967.29 s |
|
Preset Real Time |
6.01 |
PRER |
[########.###|OF{F}] |
|
OFF |
|
0 – 4,294,967.29 s |
|
Preset time |
ALL |
PRET |
[#######.#|OF{F}] |
[S] |
OFF |
|
0-99999999.9s |
|
PUR interval, on/off |
D,P,G |
PURE |
[ON|OF{F}|MAX|###.###] |
[US] |
OFF |
4 (for ###.###) |
|
|
PUR Enable |
M |
PURE |
[HI{GH}|LO{W}|OF{F}] |
[US] |
OFF |
|
|
|
Reset Configuration |
ALL |
RESC |
[Y{ES}|NO] |
|
|
1 |
|
|
Detector Reset lockout |
ALL |
RESL |
[#####|OF{F}] |
[US] |
OFF |
4 |
0-65535uS |
|
Custom RTD oneshot delay |
ALL |
RTDD |
[###] |
|
|
6 |
1-127 decimated clocks |
|
RTD on/off |
ALL |
RTDE |
[ON|OF{F}] |
|
OFF |
5 |
|
|
RTD sensitivity |
ALL |
RTDS |
[####] |
[%] |
0 |
|
2-1593 |
|
RTD threshold |
ALL |
RTDT |
[##.###] |
[%] |
0 |
|
0-49.9 |
|
Custom RTD oneshot width |
ALL |
RTDW |
[###] |
|
|
6 |
1-127 decimated clocks |
|
SCAx high threshold |
ALL |
SCAH |
[####] |
|
0 (all SCAs) |
|
0-8191 |
|
SCA index |
ALL |
SCAI |
[##] (1-16) |
|
|
|
1-16 |
|
SCAx low theshold |
ALL |
SCAL |
[####] |
|
0 (all SCAs) |
|
0-8191 |
|
SCAx output (SCA1-8 only) |
ALL |
SCAO |
[OF{F}|HI{GH}|LO{W}] |
|
OFF (all SCAs) |
|
|
|
SCA pulse width (not indexed - SCA1-8) |
ALL |
SCAW |
[100|1000] |
[NS] |
100 |
|
|
|
Scope trigger edge |
ALL |
SCOE |
[RI{SING}|FA{LLING}] |
|
RISING |
|
|
|
Digital scope gain |
ALL |
SCOG |
[1|4|16] |
|
1 |
|
|
|
Scope trigger position |
ALL |
SCOT |
[87|50|12|-25] |
[%] |
87% |
|
|
|
Set spectrum offset |
ALL |
SOFF |
[OFF|{-}####.###] |
[CH] |
OFF |
after MCAC |
-8192 to +8191.75 (8K channels); -4096 to +4095.875 (4K channels)… |
|
List-mode sync source |
6.06.05 |
SYNC |
[IN{T}|EX{T}|FR{AME}| NO{TIMETAG}] |
|
INT |
|
|
|
TEC set |
ALL; D, P |
TECS |
[###|OF{F}] |
[K] |
OFF |
|
0-299K |
|
Flat top |
ALL |
TFLA |
[##.###] |
[US] |
0uS |
4 |
0-51.2uS |
|
Fast threshold |
ALL |
THFA |
[###.###] |
|
0 |
|
0-255.937 |
|
Slow threshold |
ALL |
THSL |
[##.###] |
[%] |
0 |
|
0-24.9% |
|
LLD threshold |
6.01 |
TLLD |
[####|OF{F}] |
[CH] |
OFF |
|
0-8191 |
|
peaking time |
ALL |
TPEA |
[###.###] |
[US] |
no default |
3 |
0.8-102.4uS (CLK=20MHz); 0.2-25.6uS (80MHz); 0.2-102.4uS (AUTO) |
|
Fast channel peaking time |
ALL |
TPFA |
[50|100|200|400|1600] |
[NS] |
100 (80MHz); 400 (20MHz) |
4 |
50, 100, 400 (80MHz); 200, 400, 1600 (20MHz) |
|
Test pulser on/off |
ALL |
TPMO |
[OF{F}|+S{NG}|+D{BL}|
|
|
OFF |
|
|
|
Volume [PX5 only] |
ALL; P |
VOLU |
[OF{F}|ON] |
|
OFF |
|
|
|
*Support: Minimum firmware (FW) version to support command, plus which devices support it; ‘D’ = DP5; ‘P’ = PX5, ‘G’ = DP5G (GammaRad), ‘M’ = MCA8000D. If none are listed, then all 4 devices support the command |
|||||||
|
|
|||||||
Command: AINP
Parameter: [PO{S}|NE{G}]
Units: none
Default: NEG
Dependencies: none
Supported: FW6.00 and later
Related: INOF
Description: AINP selects the polarity of the pulses at the DP5 signal input. An Amptek Si-PIN detector produces negative-going steps; the AINP setting is ‘NEG’. An Amptek SDD detector produces positive-going steps; the AINP setting ‘POS’. [The AINP command is not related to the voltage polarity of the input; it is used for selecting the polarity of the input pulses.]
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of those listed.
Example: AINP=POS; // Select +input pulses for SDD
Command: AUO1
Parameter: [#|ICR|PILEUP|MCSTB|ONESH| DETRES|MCAEN|PEAKH|SCA8]
Units: none
Default: ICR
Range: 1-8 or the exact strings listed
Dependencies: none
Supported: FW6.00 and later
Related: SCOE, SCOT, CON1 (PX5/DP5G)
Description: AUO1 selects the source for the AUX_OUT1 signal. The selected signal is also used as the trigger source for the digital oscilloscope. The parameter can specify the signal name, or an index (1=ICR… 8=SCA8). [Note that PX5 and DP5G require the ‘CON1’ command in order to connect the AUXOUT1 signal to the AUX1 connector.]
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of the values specified, or a number in the range specified, in which case the default of ICR will be used. [Most of the commands which have text parameters only require the first two characters; this command requires all characters specified.]
Example: AUO1=PILEUP; // Set the AUX_OUT1 signal to PILEUP,
// and trigger the digital scope on it
Command: AUO2
Parameter: [#|ICR|DIAG|PEAKH|ONESH|RTDOS|RTDREJ|LIVE|VETO|STREAM]
Units: none
Default: ICR
Range: 1-9 or the exact strings listed, for FW6.06.06 and
later
1-8 or the exact strings listed, except for ‘STREAM’,
prior to FW6.06.06
Dependencies: none
Supported: FW6.00 and later (FW6.02 and later for string names, FW6.06.06 for ‘STREAM’)
Related: CON2 (PX5/DP5G)
Description: AUO2 selects the source for the AUX_OUT2 signal. The parameter can specify the signal name, or an index (1=ICR… 8=VETO, 9=STREAM). [Note that PX5 and DP5G require the ‘CON2’ command in order to connect the AUXOUT2 signal to the AUX2 connector.]
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of the values specified, or a number in the range specified, in which case the default of ICR will be used. [Most of the commands which have text parameters only require the first two characters; this command requires all characters specified.]
Example: AUO2=RTDOS; // Set the AUX_OUT2 signal to RTDOS
Command: BLRD
Parameter: [#]
Units: none
Default: 0
Range: 0-3
Dependencies: none
Supported: FW6.00 and later
Related: BLRM, BLRU
Description: BLRD selects the size of the BLR ‘down’ correction. ‘0’ is the smallest (slowest, least aggressive) and ‘3’ is the largest (fastest, most aggressive.)
Errors: An INVALID PARAMETER error will be returned if the parameter is not in the range specified.
Example: BLRD=3; // Select the most aggressive BLR ‘down’
// correction
Command: BLRM
Parameter: [OF{F}|1]
Units: none
Default: OFF
Dependencies: none
Supported: FW6.00 and later
Related: BLRU, BLRD
Description: BLRM selects whether the Baseline Restorer is enabled, and if so, which mode it will operate in. In the initial release (FW6.00), only BLR mode 1 is supported; others will be added in the future.
Errors: An INVALID PARAMETER error will be returned if the parameter is not ‘OFF’ or ‘1’.
Example: BLRM=1; // Enable the BLR
Command: BLRU
Parameter: [#]
Units: none
Default: 0
Range: 0-3
Dependencies: none
Supported: FW6.00 and later
Related: BLRM, BLRD
Description: BLRU selects the size of the BLR ‘up’ correction. ‘0’ is the smallest (slowest, least aggressive) and ‘3’ is the largest (fastest, most aggressive.)
Errors: An INVALID PARAMETER error will be returned if the parameter is not in the range specified.
Example: BLRU=1; // Select the 2nd slowest BLR ‘up’ correction
[DP5]
Command: BOOT
Parameter: [ON|OF{F}]
Units: none
Default: none
Dependencies: none
Supported: FW6.00 and later; DP5 only [not supported by PX5 or DP5G – for PX5, power button is held in at power-up to start with power supplies on. DP5G/PCG always boots with HV DAC set to its previous state.]
Related: HVSE, PAPS, TECS
Description: BOOT determines whether the PC5 power supplies (HV, TEC & Preamp) will be turned on automatically when power is applied to the DP5/PC5. If this is set to ‘ON’, then the next time the DP5/PC5 is powered up, the HV, TEC & Preamp supplies will automatically be set to the previously applied settings. The ‘BOOT’ setting is non-volatile; its setting will be retained and is not reset by the Reset Configuration (“RESC”) command. Therefore, it only needs to be sent once, although there is no harm in including it with each configuration.
Errors: An INVALID PARAMETER error will be returned if the parameter is not ‘ON’ or ‘OFF’.
Example: BOOT=ON; // Turn on the PC5 supplies at power-up
[PX5 & DP5G]
Command: CON1
Parameter: [DAC|AUXOUT1|AUXIN1]
Units: none
Default: DAC (PX5); AUXIN1 (DP5G)
Dependencies: none
Supported: FW6.03 and later; PX5 and DP5G [DP5 uses DACO, AUO1 & AUO2 to select signals. PX5 & DP5G use CONx commands to route selected signals to external connectors.]
Related: CON2, DACO, AUO1, AUO2, GPIN
Description: Selects the signal for the AUX1 connector on PX5 or DP5G/PCG. ‘DAC’ routs the output DAC to the AUX1 connector. (‘DACO’ selects which signal the DAC will output.) ‘AUXOUT1’ will output the digital signal selected by the ‘AUO1’ command. ‘AUXIN1’ switches the AUX1 connector to an input – ‘AUXIN1’ can then be selected as an input to the General Purpose Counter (via GPIN).
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of the options specified.
Example: CON1=AUXOUT1; // Configure Connector 1 to AUXOUT1
[PX5 & DP5G]
Command: CON2
Parameter: [AUXOUT2|AUXIN2|GATEH|GATEL]
Units: none
Default: AUXOUT2 (PX5); AUXIN2 (DP5G)
Dependencies: none
Supported: FW6.03 and later; PX5 and DP5G [DP5 uses DACO, AUO1, AUO2 & GATE to select signals. PX5 & DP5G use CONx commands to route selected signals to external connectors.]
Related: CON1, AUO1, AUO2, GPIN, GATE
Description: Selects the signal for the AUX2 connector on PX5 or DP5G/PCG. ‘AUXOUT2’ will output the digital signal selected by the ‘AUO2’ command. ‘AUXIN2’ switches the AUX1 connector to an input – ‘AUXIN2’ can then be selected as an input to the General Purpose Counter (via GPIN). ‘GATEH’ or ‘GATEL’ switches the AUX2 connector to an input, and uses the AUX2 signal as an active-high or active-low gate input.
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of the options specified.
Example: CON2=AUXOUT2; // Configure Connector 2 to AUXOUT2
Command: CLCK
Parameter: [20|80|AU{TO}] [DP5/PX5]
[20] [DP5G]
Units: MHZ
Default: AUTO [DP5/PX5]
20 [DP5G]
Dependencies: none
Supported: FW6.00 and later
Related: TPEA
Description: CLCK sets the FPGA clock to either 20MHz or 80MHz. If ‘AUTO’ is used as the parameter, then the value of the peaking time command (TPEA) will determine whether the FPGA clock is 20MHz or 80MHz. [The DP5G only supports 20MHz operation].
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of those listed.
Example: CLCK=20; // This sets the FPGA clock to 20MHz
Command: CLKL
Parameter: [100|1000]
Units: NS (normal), or US for 16-bit List Mode
Default: 100
Dependencies: none
Supported: FW6.06.05 and later
Related: SYNC
Description: CLKL selects the clock period (i.e. resolution) for the List-mode timer. It can be set to either 100nS or 1000nS (1uS). For 16-bit List-mode operation (SYNC=NOTIMETAG), this sets the timetag interval to 100uS or 1000uS (1mS). See Section 6.1.
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of those listed.
Example: CLKL=1000; // This sets the List-mode clock to 1uS
Command: CUSP
Parameter: [{+|-}##|OF{F}]
Units: %
Default: OFF (same as 0%)
Range: -99 to +99; ~3.1% precision
Dependencies: none
Supported: FW6.00 and later
Related: TPEA
Description: CUSP determines whether the shaper produces a trapezoidal pulse shape (CUSP=0% or OFF); a cusp-like shape (parameter is positive); or a Gaussian-like shape (parameter is negative.) Below are scope captures, with Peaking Time set to 20uS and Flat Top set to 0uS; on the left is CUSP=+50%. On the right is CUSP=-50%.
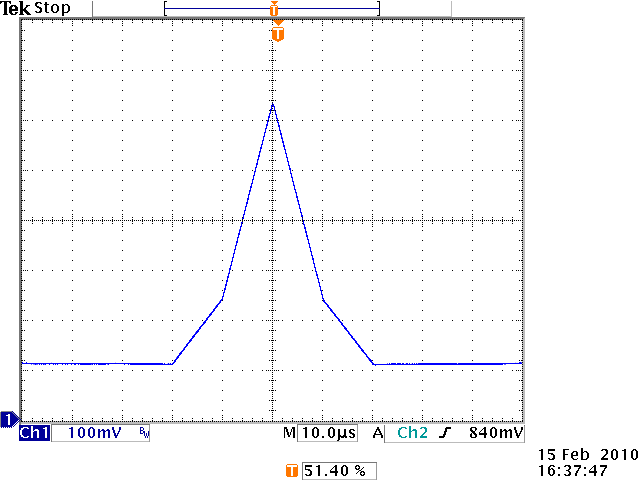
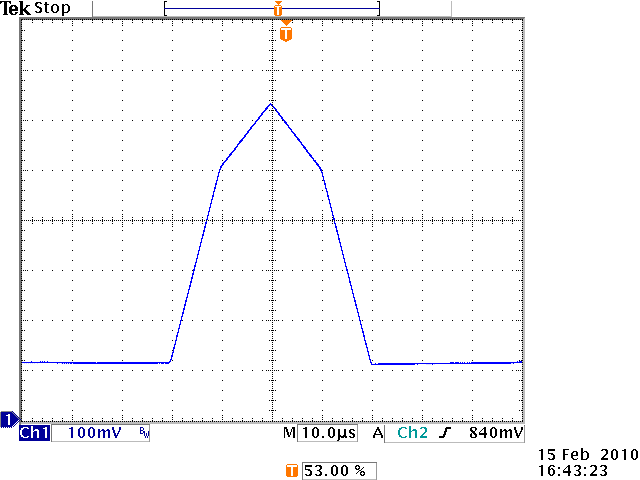
Errors: An INVALID PARAMETER error will be returned if the parameter is a number outside the specified range. A text parameter is the same as OFF and will not return an error.
Example: CUSP=50; // Enable cusp-like shaping with 50% depth
Command: DACF
Parameter: [{+|-}###]
Units: MV (millivolts)
Range: -500 to +499 mV (~3.9mV precision)
Default: 0mV
Dependencies: none
Supported: FW6.00 and later
Related: DACO, TPMO
Description: DACF sets the offset for the output DAC. The DAC has on output range of 0-1V – changing the offset allows one to see signals that would otherwise be out of range of the DAC. With a setting of 0, the DP5 clamps signals below 0V to 0V, and above 1V to 1V. At other DACF settings, the signal wraps around. [Note: if the test pulser function is enabled, then this command sets the amplitude of the test pulse. See TPMO for details.]
Errors: An INVALID PARAMETER error will be returned (and the DAC offset set to 0) if the commanded threshold is outside the range given.
Example: DACF=30; // This sets the DAC offset to 30mV, to allow signals
// slightly below logical ground to be seen.
Command: DACO
Parameter: [#|OFF|FAST|SHAPED|INPUT|PEAK]
Units: none
Default: OFF
Range: 1-8, if a number is specified
Dependencies: none
Supported: FW6.00 and later
Related: DACF, CON1 (PX5/DP5G)
Description: DACO selects the signal to be output via the DAC. Generally, this is used for diagnostic purposes – the various signals can be inspected on an oscilloscope. Either the signal name can be used, or an index number, starting with 1 = ‘FAST’. The selected signal is also fed into the Digital Oscilloscope. (See SCOE, SCOT and SCOG). Note: if the Test Pulser function is enabled, the DAC will output the test pulse signal while the Digital Oscilloscope will continue to capture the selected signal. Note: PX5 and DP5G require the ‘CON1’ command to connect the output DAC to the AUX1 connector.
Errors: An INVALID PARAMETER error will be returned if the parameter is not 1-8, or the signal name exactly as listed. [Most of the commands which have text parameters only require the first two characters; this command requires all characters specified.]
Example: DACO=SHAPED; // Select the shaped channel for the
// output DAC
Command: GAIA
Parameter: [##]
Units: none
Default: none
Range: 1 to 16 [DP5]
1 to 28 [PX5]
1 to 4 [DP5G]
Dependencies: none
Supported: FW6.00 and later
Related: GAIF, GAIN
Description: GAIA selects the analog gain. The parameter specified is an index; it selects the analog gain from the list below. The first one listed has an index of 1, up to the last one, which has an index of 16 (DP5), 28 (PX5), or 4 (DP5G).
Available DP5 analog gains: 1.12, 2.49, 3.78, 5.28, 6.56, 8.39, 10.09, 11.32, 14.55, 17.77, 22.40, 30.84, 38.12, 47.47, 66.16, 101.83
Available PX5 analog gains: 1.00, 1.25, 1.56, 1.95, 2.43, 3.04, 3.78, 4.75, 5.96, 7.47, 9.34, 11.66, 14.57, 18.18, 22.72, 28.37, 35.46, 44.64, 55.83, 69.79, 87.10, 108.62, 135.84, 169.80, 211.99, 264.99, 330.70, 413.38
Available DP5G analog gains: 1.57, 2.56, 4.09, 6.77
Errors: An INVALID PARAMETER error will be returned if the parameter is not with the range specified.
Example: GAIA=5; // Select an analog gain of 6.56 (DP5)
Command: GAIF
Parameter: [##.####]
Units: none
Default: none
Range: 0.5-1.9999
Dependencies: TPEA must precede GAIF
Supported: FW6.00 and later
Related: GAIA, GAIN
Description: GAIF sets the fine gain. The total gain is a
product of the analog gain and fine gain. [Generally, either the GAIN
command is used, or the combination of GAIA and GAIF.]
Internally,
the fine gain is combined with a normalization for gain variations
due to peaking time. Because of this, the precision of the fine gain
is dependent on peaking time. It is always has a precision of at
least 1 channel in 8192; generally, the precision is better than
that.
Errors: An INVALID PARAMETER error will be returned if the parameter is not with the range specified.
Example: GAIF=1.05; // Set the digital fine gain to 1.05
Command: GAIN
Parameter: [###.###]
Units: none
Default: none
Range: 0.75 to 150 [DP5]
0.75 to 500 [PX5]
1.0 to 10.0 [DP5G]
Dependencies: TPEA must precede GAIN
Supported: FW6.00 and later
Related: GAIA, GAIF
Description: GAIN sets the total gain. First, it searches for
the nearest available ‘coarse gain’ for the analog front
end (listed below for reference.) It then calculates the digital
‘fine gain’ to achieve the commanded gain, while also
normalizing for gain differences caused by peaking time
variations.
(See the GAIA command for available analog gains)
Errors: An INVALID PARAMETER error will be returned if the parameter is not with the range specified.
Example: GAIN=100; // Set the combined digital and analog gain to 100
[DP5 only]
Command: GATE
Parameter: [OF{F}|HI{GH}|LO{W}]
Units: none
Default: OFF
Dependencies: none
Supported: FW6.00 and later; DP5 only [PX5 and DP5G use ‘CON2’ to configure the GATE function]
Related: CON1 (PX5 & DP5G)
Description: GATE selects whether the GATE function is enabled, and if so, the polarity of the GATE input. “HIGH” means that events are rejected while the GATE input is high; “LOW” means that events are rejected while the GATE input is low. If enabled, GATE uses the DP5 AUX_IN1 input, which has a pull-down resistor on it.
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of the values specified.
Example: GATE=HIGH; //
Enable GATE – events are rejected while input
// is
high
Command: GPED
Parameter: [RI{SING}|FA{LLING}]
Units: none
Default: FALLING
Dependencies: none
Supported: FW6.00 and later
Related: GPIN, GPME, GPGA, GPMC; ‘Clear G.P. Counter’ Request Packet
Description: GPED selects on which edge of its source the General Purpose (G.P.) Counter will increment.
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of the values specified.
Example: GPED=RI; // Count on the rising edge of the G.P. Counter input
Command: GPGA
Parameter: [ON|OF{F}]
Units: none
Default: ON
Dependencies: none
Supported: FW6.00 and later
Related: GPED, GPIN, GPME, GPMC, GATE; ‘Clear G.P. Counter’ Request Packet
Description: GPGA selects whether the G.P. counter is conditioned by the GATE input. In order to use this, the GATE command must also be sent to configure the GATE input polarity. If GATE is disabled (‘GATE=OFF’), then GPGA will have no effect. GPGA is redundant if GPME=ON, because MCA Enable is gated by GATE already.
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of the values specified.
Example: GPGA=ON; // Qualify the G.P. Counter with GATE
Command: GPIN
Parameter: [#|AUX1|AUX2|PILEUP|RTDREJ|SCA8|TBD|DETRES|OFF]
Units: none
Default: AUX1
Range: 1-8
Dependencies: none
Supported: FW6.00 and later
Related: GPED, GPME, GPGA, GPMC; ‘Clear G.P. Counter’ Request Packet; CON1, CON2 (PX5/DP5G)
Description: GPIN selects the source for the General Purpose (G.P.) Counter. The G.P. Counter will count rising or falling edges of the source (see GPED). (‘AUX1’ refers to the DP5 AUX_IN1 input; ‘AUX2 ‘ refers to the DP5 AUX_IN2 input. ‘TBD’ is currently undefined.) An index can be used rather than the signal name; 1=AUX1…8=OFF. Note: PX5 and DP5G require the ‘CON1’ (‘CON2’) command to connect the AUXIN1 (AUXIN2) input to the AUX1 (AUX2) connector, for it to be available as a counter source.
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of the values specified, or a number in the range specified, in which case the default of AUX1 will be used. [Most of the commands which have text parameters only require the first two characters; this command requires all characters specified.]
Example: GPIN=RTDREJ; // Set the G.P. Counter to count events
// rejected by RTD
Command: GPMC
Parameter: [ON|OF{F}]
Units: none
Default: ON
Dependencies: none
Supported: FW6.00 and later
Related: GPED, GPIN, GPME, GPGA, GATE; ‘Clear G.P. Counter’ Request Packet
Description: GPMC selects whether the G.P. counter is cleared when the MCA (spectrum) is cleared. If GPMC=OFF, then the G.P. Counter is only cleared by the ‘Clear G.P. Counter’ Request Packet.
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of the values specified.
Example: GPMC=ON; // Clear the G.P. Counter when the spectrum is
// cleared
Command: GPME
Parameter: [ON|OF{F}]
Units: none
Default: ON
Dependencies: none
Supported: FW6.00 and later
Related: GPED, GPIN, GPGA, GPMC; ‘Clear G.P. Counter’ Request Packet
Description: GPME selects whether the G.P. Counter is gated by the internal MCA Enable signal, or whether it is free-running. [The MCA is disabled by Detector Reset (if enabled – see RESL), GATE (if enabled – see GATE), Preset Counts (see PREC), Preset Time (see PRET), Preset Real Time (see PRER), the ‘MCA Enable’ and ‘MCA Disable’ Request Packets, and briefly during internal buffer operations.]
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of the values specified.
Example: GPME=ON; // Enable/disable the G.P. Counter with the MCA
Command: HVSE
Parameter: [{+|-}####|OFF]
Units: V
Default: OFF
Range: 0 to 1500V (for a positive HV PC5);
0 to -1500V (for
a negative HV PC5);
-1500V to 1500V [PX5]
-5000V to 5000V [PX5 with HPGe HVPS option]
Dependencies: none
Supported: FW6.00 and later
Description: HVSE turns on or off the PC5 HV supply and sets the HV. The PC5 can have either a positive or negative supplies. The DP5 will compare the polarity of the parameter to the polarity of the PC5 HV supply, and will only turn on the HV supply if the specified polarity matches the PC5. [PX5 compares the polarity of the parameter to the position of the HV polarity jumper.]
Errors: DP5: An INVALID PARAMETER error will be returned if the PC5 does not have the same polarity HV supply as the voltage specified, or if the specified HV is outside the range listed. A PC5 NOT PRESENT error will be returned if a PC5 is not detected.
PX5: An INVALID PARAMETER error will be returned if the polarity of the specified voltage does not agree with the PX5 HV polarity jumper, or if the specified HV is outside the range listed.
Example: HVSE=150; // Set the PC5 HV supply to 150V, but only // if it’s a +HV PC5
[DP5/PX5 only]
Command: INOF
Parameter: [{+|-}####|AU{TO}|DE{F}]
Units: MV (millivolts)
Default: DEF
Range: -2047mV to +2047mV
Dependencies: AINP, if ‘DEF’ is used; INOG, if INOG=HIGH (see below)
Supported: FW6.00 and later; not supported on DP5G, which does not have a variable input offset
Related: AINP, INOG
Description: INOF sets a DAC, which shifts the input to the
ADC so that the signal is in the proper range. Generally, the default
setting (‘DEF’) can be used, because a standard DP5 has
an AC-coupled signal input which removes DC levels from the preamp.
For a customized DP5 (or a PX5 with preamp pole cancellation enabled
via ‘PAPZ’), it may be necessary to set the input offset
manually. If so, it should be set to produce a DC level of ~200mV
(for AINP=NEG) or ~1.8V (for AINP=POS) at the test point AMP3OUT
(DP5) or AMPOUT (PX5). [Note that in the DP5, there is a gain of 2
for the DAC output; changing INOF by 100mV results in the AMP3OUT
testpoint shifting 200mV.]
In the PX5, the ‘INOG’
command can be used to change the gain of the input offset. If used,
the ‘INOG’ command must precede INOF. If the high gain
input offset (‘INOG=HIGH’) is used, then the ‘DEF’
(default) option for INOF cannot be used, and will result in an
INVALID PARAMETER error.
The ‘AUTO’ parameter may
be specified, in which case the DP5 or PX5 will search for an
appropriate input offset. Note that the detector must be stable for
this to work; if HV or temperature has not stabilized, then this will
not operate properly.
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of those listed.
Example: INOF=200; // Set the input offset DAC to 200mV
[PX5 only]
Command: INOG
Parameter: [LO{W}|HI{GH}]
Units: none
Default: LOW
Dependencies:
Supported: FW6.06 and later; PX5 only
Related: AINP, INOF
Description: In the PX5, the input offset is normally
injected after the gain stages – this is the “LOW”
setting. If preamp pole cancellation is used, then a DC offset may
exist prior to the gain stages, and depending on gain, may result in
an offset too large for the low gain input offset to correct.
Selecting “HIGH” results in the input offset being
injected earlier in the analog chain, so that it can correct a larger
DC offset.
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of those listed.
Example: INOG=HIGH; // Set the input offset gain to HIGH
Command: MCAC
Parameter: [256|512|1024|2048|4096|8192]
Units: channels
Default: 1024
Dependencies: none
Supported: FW6.00 and later
Description: MCAC selects the total number of channels for the MCA. [This is sometimes referred to as ‘MCA Gain’.]
Errors: An INVALID PARAMETER error will be returned if the parameter is other than those listed, and 1024 channel operation will be selected.
Example: MCAC=512; // Select 512 MCA channels
Command: MCAE
Parameter: [ON|OF{F}]
Units: none
Default: OFF
Dependencies: none
Supported: FW6.00 and later
Description: MCAE sets the initial state of MCA Enable. It determines whether the acquisition starts immediately after the Configuration Packet is processed (‘ON’), or whether the DP5 will wait for an ‘Enable MCA/MCS’ Request Packet to start the acquisition (‘OFF’).
Errors: An INVALID PARAMETER error will be returned if the parameter is neither ‘ON’ nor ‘OFF’.
Example: MCAE=ON; // Start taking data immediately
Command: MCAS
Parameter: [NO{RM}|MC{S}|FA{ST}| PU{R}|RT{D}]
Units: none
Default: NORM
Dependencies: RTDE
Supported: FW6.00 and later
Related:
Description: MCAS selects the operating mode of the MCA, as
listed below:
‘NORM’ – normal MCA operation,
using the shaped channel as the source
‘MCS’ -
selects Multi-channel Scaler mode, rather than MCA. [MCS mode records
counts vs. time, rather than counts vs. energy. SCA8 is the source of
counts in MCS mode. See SCAI, SCAL, SCAH]
‘FAST’ –
the MCA produces a spectrum using the Fast channel as the source,
rather than the shaped channel. [This requires RTD to be disabled to
work properly. See RTDE.]
‘PUR’ – the MCA
records only piled-up events, rather than normal events. [This
requires RTD to be disabled to work properly. See RTDE.]
‘RTD’
– the MCA records only events that would normally be rejected
by RTD. [This requires RTD to be enabled to work properly. See RTDE,
RTDS and RTDT.]
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of those listed, and ‘NORM’ will be used.
Example: MCAC=FAST; // Acquire a spectrum of the fast channel
Command: MCSL
Parameter: [####]
Units: channel
Default: 0
Range: Depends on number of channels specified by MCAC:
256
ch: 0 - 255
512 ch: 0 – 511
1024 ch: 0 - 1023
2048 ch:
0 - 2047
4096 ch: 0 - 4095
8192 ch: 0 – 8191
Dependencies: none
Supported: FW6.01 and later
Related: MCSH, MCST, MCAS
Description: MCSL sets the low threshold for the MCS (Multi-Channel Scaler). The low and high thresholds are exclusive; for example, PRCL=100 and PRCH=102 will only count events that occur in channel 101. [The MCS thresholds only have meaning when the MCS operational mode is selected by the MCAS command.]
Errors: An INVALID PARAMETER error will be returned if the parameter is outside the range 0- 8191; it is not error-checked with regard to the ranges listed. If MCSL is set higher than MCSH, no error is generated, but no events will be counted as this is an impossible condition.
Example: MCSL=100; // Set MCS to count events from
MCSH=200; // channel 101 to 199
Command: MCSH
Parameter: [####]
Units: channel
Default: 8191
Range: Depends on number of channels specified by MCAC:
256
ch: 0 - 255
512 ch: 0 – 511
1024 ch: 0 - 1023
2048 ch:
0 - 2047
4096 ch: 0 - 4095
8192 ch: 0 – 8191
Dependencies: none
Supported: FW6.01 and later
Related: MCSL, MCST, MCAS
Description: MCSH sets the high threshold for the MCS (Multi-Channel Scaler). The low and high thresholds are exclusive; for example, MCSL=100 and MCSH=102 will only count events that occur in channel 101. [The MCS thresholds only have meaning when the MCS operational mode is selected by the MCAS command.]
Errors: An INVALID PARAMETER error will be returned if the parameter is outside the range 0- 8191; it is not error-checked with regard to the ranges listed. If MCSL is set higher than MCSH, no error is generated, but no events will be output or counted as this is an impossible condition.
Example: MCSL=100; // Set MCS to count events from
MCSH=200; // channel 101 to 199
Command: MCST
Parameter: [###.###]
Units: S (seconds)
Default: 0
Range: 0 – 655.35s; 10mS precision
Dependencies: none
Supported: FW6.00 and later
Related: MCAS
Description: MCST configures the timebase used by the MCS (Multi-Channel Scaler) – this is the duration of each ‘channel’ in the MCS acquisition. It is only relevant if the acquisition is in MCS mode, rather than MCA mode. (See the MCAS command.)
Errors: An INVALID PARAMETER error will be returned if the parameter is not within the range specified.
Example: MCST=10; // Set the MCS timebase to 10 seconds per channel
[DP5/PX5 only]
Command: PAPS
Parameter: [8{.5}|5|OF{F}|ON] [DP5]
[8{.5}|5|OF{F}] [PX5]
[OF{F}|ON] [PX5 with HPGe HVPS option]
Units: V
Default: OFF
Dependencies: none
Supported: FW6.00 and later; not supported on DP5G
Description: PAPS turns on or off the PC5 preamp power supplies. The PC5 can have either +/-5V or +/-8.5V preamp supplies. If the 5 or 8.5 option is specified, the PC5 will be checked to verify if it’s the commanded type before it is switched on. If ‘ON’ is commanded, this test will not be performed – the PC5 preamp supplies will be turned on regardless of which voltage they are. [‘ON’ is not an option for the PX5 – the voltage must be specified, except for a PX5 with the HPGe HVPS option – then only ‘ON’ and ‘OFF’ are accepted.]
Errors: An INVALID PARAMETER error will be returned if the PC5 does not have the preamp power supplies of the voltage specified, or if a parameter other than those listed is specified. A PC5 NOT PRESENT error will be returned if a PC5 is not detected.
Example: PAPS=5; // Turn on the PC5 preamp supplies, but only // if it’s a 5V PC5
[PX5 only]
Command: PAPZ
Parameter: [####.#|OF{F}]
Units: US (microseconds)
Default: OFF
Range: 34.5-4387uS [firmware rounds to nearest of 127 discrete values; discrete values are 4386.7uS/n, for n=1…127]
Dependencies: none
Supported: FW6.05 and later; PX5 only
Description: PAPZ enables or disables the pole-zero cancellation in the PX5 front-end electronics, and selects the time constant to cancel. The specified time constant is rounded to the nearest discrete value. The equation to generate the discrete values is given in the ‘Range’ above. These values have a tolerance of roughly 1%. The 127 possible values, in uS, are:
|
34.5 |
39.5 |
46.2 |
55.5 |
69.6 |
93.3 |
141.5 |
292.4 |
|
34.8 |
39.9 |
46.7 |
56.2 |
70.8 |
95.4 |
146.2 |
313.3 |
|
35.1 |
40.2 |
47.2 |
57.0 |
71.9 |
97.5 |
151.3 |
337.4 |
|
35.4 |
40.6 |
47.7 |
57.7 |
73.1 |
99.7 |
156.7 |
365.6 |
|
35.7 |
41.0 |
48.2 |
58.5 |
74.4 |
102.0 |
162.5 |
398.8 |
|
36.0 |
41.4 |
48.7 |
59.3 |
75.6 |
104.4 |
168.7 |
438.7 |
|
36.3 |
41.8 |
49.3 |
60.1 |
77.0 |
107.0 |
175.5 |
487.4 |
|
36.6 |
42.2 |
49.8 |
60.9 |
78.3 |
109.7 |
182.8 |
548.3 |
|
36.9 |
42.6 |
50.4 |
61.8 |
79.8 |
112.5 |
190.7 |
626.7 |
|
37.2 |
43.0 |
51.0 |
62.7 |
81.2 |
115.4 |
199.4 |
731.1 |
|
37.5 |
43.4 |
51.6 |
63.6 |
82.8 |
118.6 |
208.9 |
877.3 |
|
37.8 |
43.9 |
52.2 |
64.5 |
84.4 |
121.9 |
219.3 |
1096.7 |
|
38.1 |
44.3 |
52.9 |
65.5 |
86.0 |
125.3 |
230.9 |
1462.2 |
|
38.5 |
44.8 |
53.5 |
66.5 |
87.7 |
129.0 |
243.7 |
2193.4 |
|
38.8 |
45.2 |
54.2 |
67.5 |
89.5 |
132.9 |
258.0 |
4386.7 |
|
39.2 |
45.7 |
54.8 |
68.5 |
91.4 |
137.1 |
274.2 |
|
Errors: Parameter values between 34.5uS and 8773uS are rounded to the nearest discrete value from the table above. Outside that range, an INVALID PARAMETER error will be returned, and the pole-zero cancellation circuit will be switched off.
Example: PAPZ=50; // Turn on the pole-zero cancellation, and
// cancel a 50uS time constant
Command: PDMD
Parameter: [NO{RM}|MI{N}]
Units: none
Default: NORM
Dependencies: none
Supported: FW6.00 and later
Related: SOFF
Description: Normally, the DP5 Peak Detect unit searches for maxima in the shaped pulse stream, to determine which events to include in the spectrum. (This is the normal Peak Detect Mode; PDMD=NORM). PDMD=MIN configures the Peak Detect unit to search for both minima and maxima, in order for the MCA to be able to capture the ‘noise Gaussian’ around the zero energy point of the spectrum. Because the MCA can’t capture negative peaks, the Spectrum Offset (SOFF) should be used to shift the spectrum positive, so the entire noise Gaussian can be captured.
Errors: An INVALID PARAMETER error will be returned if the parameter is not NORM or MIN.
Example: PDMD=MIN; // Set the Peak Detect to MIN+MAX mode
Command: PRCL
Parameter: [####]
Units: channel
Default: 0
Range: Depends on number of channels specified by MCAC:
256
ch: 0 - 255
512 ch: 0 – 511
1024 ch: 0 - 1023
2048 ch:
0 - 2047
4096 ch: 0 - 4095
8192 ch: 0 – 8191
Dependencies: none
Supported: FW6.01 and later
Related: PRCH, PREC
Description: PRCL sets the low threshold for the Preset Counts. The low and high thresholds are exclusive; for example, PRCL=100 and PRCH=102 will only count events that occur in channel 101.
Errors: An INVALID PARAMETER error will be returned if the parameter is outside the range 0- 8191; it is not error-checked with regard to the ranges listed. If PRCL is set higher than PRCH, no error is generated, but no events will be counted as this is an impossible condition.
Example: PRCL=100; // Set Preset Counts to count events from
PRCH=200; // channel 101 to 199
Command: PRCH
Parameter: [####]
Units: channel
Default: 8191
Range: Depends on number of channels specified by MCAC:
256
ch: 0 - 255
512 ch: 0 – 511
1024 ch: 0 - 1023
2048 ch:
0 - 2047
4096 ch: 0 - 4095
8192 ch: 0 – 8191
Dependencies: none
Supported: FW6.01 and later
Related: PRCL, PREC
Description: PRCH sets the high threshold for the Preset Counts. The low and high thresholds are exclusive; for example, PRCL=100 and PRCH=102 will only count events that occur in channel 101.
Errors: An INVALID PARAMETER error will be returned if the parameter is outside the range 0- 8191; it is not error-checked with regard to the ranges listed. If PRCL is set higher than PRCH, no error is generated, but no events will be output or counted as this is an impossible condition.
Example: PRCL=100; // Set Preset Counts to count events from
PRCH=200; // channel 101 to 199
Command: PREC
Parameter: [##########|OF{F}]
Units: counts
Default: OFF
Range: 0 – 4,294,967,295 (i.e. 2^32 -1)
Dependencies: none
Supported: FW6.00 and later
Related: PRET, PRER, PRCL, PRCH
Description: PREC specifies the preset counts. The acquisition will stop automatically when the number of events registered between the channels specified by PRCL and PRCH reaches this value. If OFF (or 0) is specified, the acquisition will continue unless stopped by other means (PRET, PRER, MCA disable Request Packet, etc.) By configuring PREL and PREH appropriately, this command allows an acquisition to be stopped by the counts in a single channel, a ROI, or the entire spectrum.
Errors: No errors are returned – an unrecognized parameter is interpreted as ‘OFF’. A number outside the range listed is converted to a 32-bit unsigned integer.
Example: PREC=10000; // Stop when the total counts between channels PRCL & PRCH
// reaches 10,000
Command: PREL
Parameter: [########.###|OF{F}]
Units: S (seconds)
Default: OFF
Range: 0 – 4,294,967.29 seconds; 0.01 second
precision
(Note that because the parameter field is limited to 10
characters, the following limit applies if 3 digits are required to
the right of the decimal point)
0 – 999,999.999 seconds;
0.001 second precision
Dependencies: none
Supported: FW6.07.00 and later; MCA8000D only
Related: PREC, PRET, PRER
Description: PREL sets the preset livetime. The acquisition will stop automatically when the livetime reaches this value. If OFF (or 0) is specified, the acquisition will continue unless stopped by other means (PREC, PRET, MCA disable Request Packet, etc.)
Errors: An INVALID PARAMETER error will be returned if the parameter is not ‘OFF’ or a number within the range specified.
Example: PREL=100; // Stop the acquisition when livetime reaches 100s
Command: PRER
Parameter: [########.###|OF{F}]
Units: S (seconds)
Default: OFF
Range: 0 – 4,294,967.29 seconds; 0.01 second
precision
(Note that because the parameter field is limited to 10
characters, the following limit applies if 3 digits are required to
the right of the decimal point)
0 – 999,999.999 seconds;
0.001 second precision
Dependencies: none
Supported: FW6.01 and later
Related: PREC, PRET
Description: PRER sets the preset real time. The acquisition will stop automatically when the real time reaches this value. If OFF (or 0) is specified, the acquisition will continue unless stopped by other means (PREC, PRET, MCA disable Request Packet, etc.)
Errors: An INVALID PARAMETER error will be returned if the parameter is not ‘OFF’ or a number within the range specified.
Example: PRER=100; // Stop the acquisition when real time reaches 100s
Command: PRET
Parameter: [########.#|OF{F}]
Units: S (seconds)
Default: OFF
Range: 0 – 99,999,999.9 seconds; 0.1 second precision
Dependencies: none
Supported: FW6.00 and later
Related: PREC, PRER
Description: PRET sets the preset acquisition time. The acquisition will stop automatically when the acquisition time reaches this value. If OFF (or 0) is specified, the acquisition will continue unless stopped by other means (PREC, PRER, MCA disable Request Packet, etc.)
Errors: An INVALID PARAMETER error will be returned if the parameter is not ‘OFF’ or a number within the range specified.
Example: PRET=100; // Stop the acquisition when it reaches 100s
Command: PURE
Parameter: [ON|OF{F}|MA{X}|###.###]
Units: US (microseconds)
Default: OFF
Range: The table below specifies the range of the PUR interval as a function of peaking time and FPGA clock.
Dependencies: TPEA must precede PURE, if ###.### is specified. None, otherwise.
Supported: FW6.00 and later
Related: THFA
Description: PURE is used to enable or disable Pile-up Rejection. Normally (for PURE=ON), the Pile-up interval is dynamic; the DP5 varies the interval on a pulse-by-pulse basis to minimize deadtime. However, this can be overridden. The interval can be set to a constant, or to the maximum available. See the table below for allowable values. The PUR interval is started when a peak is detected on the Fast Channel which exceeds its threshold, so THFA must be set properly.
Errors: An INVALID PARAMETER error will be returned if the parameter is not ON, OFF, MAX, or within the range specified below. If a number is specified that is greater than is allowed, INVALID PARAMETER will be returned and the PUR interval will be set to its maximum.
Example: PURE=ON; // Enable Pile-up Rejection
|
FPGA Clock=20MHz |
FPGA Clock=80MHz |
||||
|
Peaking Time |
PUR Interval |
Precision |
Peaking Time |
PUR Interval |
Precision |
|
0.800 - 6.40uS |
0 - 25.6uS |
50nS |
0.200 - 1.600uS |
0 - 6.39uS |
12.5nS |
|
6.60 - 12.80uS |
0 - 51.1uS |
100nS |
1.650 - 3.200uS |
0 - 12.8uS |
25nS |
|
13.20 - 25.60uS |
0 - 102.2uS |
200nS |
3.30 - 6.40uS |
0 - 25.6uS |
50nS |
|
26.40 - 51.20uS |
0 - 204.4uS |
400nS |
6.60 - 12.80uS |
0 - 51.1uS |
100nS |
|
52.80 - 102.4uS |
0 - 408.8uS |
800nS |
13.20 - 25.60uS |
0 - 102.2uS |
200nS |
Command: RESC
Parameter: [Y]
Units: none
Default: none
Dependencies: none
Supported: FW6.00 and later
Related:
Description: RESC is used to reset the DP5’s
configuration to default settings. It resets each setting to the
default listed for each command and in table XX. If it is used, it
should be the first command in the ACII configuration packet.
RESC
is useful because the DP5 stores the settings from previous
configuration commands in non-volatile memory, and new
Errors: No error is returned regardless of the parameter, but the configuration is only reset if the parameter is ‘Y’.
Example: RESC=Y; // Reset the configuration to default settings
Command: RESL
Parameter: [#####|OF{F}]
Units: US (microseconds)
Range: In FW6.01, the DP5 will select the nearest available
Reset Lockout Interval from the following list:
FPGA
clock=80MHz: 25.6uS, 51.2uS, 102.4uS, 204.8uS, 409.6uS, 819.2uS,
1638.4uS, 3276.8uS
FPGA clock=20MHz: 102.4uS, 204.8uS,
409.6uS, 819.2uS, 1638.4uS, 3276.8uS, 6553.6uS, 13107.2uS
Default: OFF
Dependencies: TPEA must precede RESL
Supported: FW6.00 and later
Related:
Description: RESL determines whether the MCA data taking will be paused when a detector reset is detected. If OFF is selected, then the detection of detector reset is disabled. Otherwise, the nearest value from those listed in Range will be selected.
Errors: No error checking is done on the parameter; the next largest value in Range will be used if a number is specified. If the parameter isn’t recognized, the lowest value in Range is used.
Example: RESL=1000; // This selects a Reset Lockout Interval of 1638.4uS
Command: RTDD
Parameter: [###]
Units: decimated clocks
Default: none
Range: 1 - 127
Dependencies: RTDE must precede RTDD
Supported: FW6.00 and later
Related: RTDE, RTDS, RTDT, RTDW
Description: RTDD is used to fine-tune the timing of the RTD
logic. It may be needed for events with very slow risetimes, or
configurations where the shaper produces a non-trapezoidal/cusp
shape. For these events, the peak of the shaped event may not occur
when it is expected. The standard RTD timing parameters are
calculated when the RTDE command is received, so the RTDW & RTDD
commands must come after RTDE, so that they can override the standard
timing.
To fine-tune the RTD timing:
1. Use DACO=SHAPED
and AUO2=5 (for RTD_ONESHOT). Use an oscilloscope to view both
signals. Trigger on either.
2. Use the parameters for RTDW and
RTDD to adjust the width and delay of the RTD_ONESHOT signal –
it should bracket the time during which the peak occurs for a variety
of pulses.
Errors: An INVALID PARAMETER error will be returned if the parameter is not in the range specified.
Example: RTDD=60; // Override the standard RTD timing – set the
// RTD Oneshot delay to 60 decimated clocks
Command: RTDE
Parameter: [ON|OF{F}]
Units: none
Default: OFF
Dependencies: TPEA & TFLA
Supported: FW6.00 and later
Related: RTDT, RTDS
Description: RTDE is used to enable risetime discrimination (RTD). RTDS and RTDT are also needed to completely configure RTD. For very slow or distorted pulses, RTDW and RTDD may be needed, to override standard RTD timing parameters.
Errors: An INVALID PARAMETER error will be returned if the parameter is not ON or OFF, and RTD will be disabled.
Example: RTDE=ON; // Enable Pile-up Rejection
Command: RTDS
Parameter: [####]
Units: %
Default: 0%
Range: 2-398% (1.5% precision), 400-1593% (6.5% precision)
Dependencies: none
Supported: FW6.00 and later
Related: RTDE, RTDT
Description: RTDS sets the Risetime Discrimination (RTD) Sensitivity. RTD is performed by taking the ratio of the peak slow channel amplitude to the peak fast channel amplitude for a given pulse – the event is rejected if the ratio is above the sensitivity setting. [As the risetime gets slower, the fast channel response falls off faster than the slow channel, so the ratio increases for the event increases.] If the peak slow channel amplitude is below the RTD Threshold (see RTDT), it will be accepted regardless of the ratio and sensitivity setting. This command has no effect if RTD is disabled (see RTDE).
Errors: An INVALID PARAMETER error will be returned if the parameter is not within the range specified, and the sensitivity will be set to 0%.
Example: RTDS=500; // Set the RTD Sensitivity to 500%
Command: RTDT
Parameter: [##.###]
Units: % full-scale
Default: 0%
Range: 0-49.9% (~0.2% precision)
Dependencies: none
Supported: FW6.00 and later
Related: RTDE, RTDS
Description: RTDT sets the Risetime Discrimination (RTD) Threshold. If the peak slow channel amplitude is below the RTD Threshold, it will be accepted regardless of the sensitivity setting. This has no effect if RTD is disabled (see RTDE).
Errors: An INVALID PARAMETER error will be returned if the parameter is not within the range specified, and the threshold will be set to 49.9% (or 0% if a negative number is specified).
Example: RTDT=10; // Set the RTD Threshold to 10% full-scale.
// i.e. for 1K channels, 10% = channel 102
Command: RTDW
Parameter: [###]
Units: decimated clocks
Default: none
Range: 1 - 127
Dependencies: RTDE must precede RTDW
Supported: FW6.00 and later
Related: RTDE, RTDS, RTDT, RTDD
Description: RTDW is used to fine-tune the timing of the RTD
logic. It may be needed for events with very slow risetimes, or
configurations where the shaper produces a non-trapezoidal/cusp
shape. For these events, the peak of the shaped event may not occur
when it is expected. The standard RTD timing parameters are
calculated when the RTDE command is received, so the RTDW & RTDD
commands must come after RTDE, so that they can override the standard
timing.
For instructions on how to fine-tune the RTD timing,
see the ‘RTDD’ command.
Errors: An INVALID PARAMETER error will be returned if the parameter is not in the range specified.
Example: RTDW=60; // Override the standard RTD timing – set the
// RTD Oneshot period to 60 decimated clocks
Command: SCAH
Parameter: [####]
Units: channel
Default: 8191 (for all SCAs)
Range: Depends on number of channels specified by MCAC:
256
ch: 0 - 255
512 ch: 0 – 511
1024 ch: 0 - 1023
2048 ch:
0 - 2047
4096 ch: 0 - 4095
8192 ch: 0 – 8191
Dependencies: SCAI must precede SCAH
Supported: FW6.00 and later
Related: SCAI, SCAL, SCAO; SCAW is not indexed
Description: SCAH sets the high threshold for the SCA referenced by the SCA Index (SCAI). The low and high thresholds are exclusive; for example, SCAL=100 and SCAH=102 will only output events that occur in channel 101.
Errors: An INVALID PARAMETER error will be returned if the parameter is outside the range 0- 8191; it is not error-checked with regard to the ranges listed. If SCAL is set higher than SCAH, no error is generated, but no events will be output or counted as this is an impossible condition.
Example: SCAI=2; // Set the SCA Index to 2; enable SCA2 output as
// active high
SCAL=100; // Set the SCA2 LLD to channel 100
SCAH=200; // Set the SCA2 HLD to channel 200
Command: SCAI
Parameter: [#]
Units: none
Default: none
Range: 1-16
Dependencies:
Supported: FW6.00 and later
Related: SCAL, SCAH, SCAO; SCAW is not indexed
Description: SCAI is used in conjunction with the SCAL, SCAH and SCAO commands to specify which SCA these commands will apply to. When the SCA index is set to 1 through 8, it also enables the specified SCA output and sets it to active high, so the SCAO command doesn’t need to be specified unless a different output option is needed.
Errors: An INVALID PARAMETER error will be returned if the parameter is not within the range specified.
Example: SCAI=2; // Set the SCA Index to 2; enable SCA2 output as
// active high
SCAL=100; // Set the SCA2 LLD to channel 100
SCAH=200; // Set the SCA2 HLD to channel 200
Command: SCAL
Parameter: [####]
Units: channel
Default: 0 (for all SCAs)
Range: Depends on number of channels specified by MCAC:
256
ch: 0 - 255
512 ch: 0 – 511
1024 ch: 0 - 1023
2048 ch:
0 - 2047
4096 ch: 0 - 4095
8192 ch: 0 – 8191
Dependencies: SCAI must precede SCAL
Supported: FW6.00 and later
Related: SCAI, SCAH, SCAO; SCAW is not indexed
Description: SCAL sets the low threshold for the SCA referenced by the SCA Index (SCAI). The low and high thresholds are exclusive; for example, SCAL=100 and SCAH=102 will only output events that occur in channel 101.
Errors: An INVALID PARAMETER error will be returned if the parameter is outside the range 0- 8191; it is not error-checked with regard to the ranges listed. If SCAL is set higher than SCAH, no error is generated, but no events will be output or counted as this is an impossible condition.
Example: SCAI=2; // Set the SCA Index to 2; enable SCA2 output as
// active high
SCAL=100; // Set the SCA2 LLD to channel 100
SCAH=200; // Set the SCA2 HLD to channel 200
Command: SCAO
Parameter: [OF{F}|HI{GH}|LO{W}]
Units: none
Default: OFF; HIGH when SCAI is set for an SCA
Dependencies: SCAI must precede SCAO
Supported: FW6.00 and later
Related: SCAI, SCAL, SCAH; SCAW is not indexed
Description: SCAO configures the output of the indexed SCA. For a setting of ‘OFF’, the indexed SCA output will always be low. For a setting of ‘HIGH’, the indexed output will be normally low and will produce a high pulse when an event occurs between the SCA low and high thresholds. For a setting of ‘LOW’, the indexed output will be normally high and will produce a low pulse. Note: only SCAs 1-8 have pulse outputs; SCAs 9-16 have counters, not pulse outputs. Also, if the SCA outputs 1-8 are all OFF, then the outputs are all tri-stated. If any of the outputs 1-8 are enabled, then they all are driven.
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of those specified in range. Selecting the output level when the SCA index is set to 9-16 has no meaning, since these SCAs don’t have outputs, but this will not produce an error.
Example: SCAI=2; // Set the SCA Index to 2; enable SCA2 output as
// active high
SCAO=LOW; // Set SCA2 to an active low output instead
Command: SCAW
Parameter: [100|1000]
Units: NS (nanoseconds)
Default: 100
Dependencies: none
Supported: FW6.00 and later
Related: SCAI, SCAL, SCAH
Description: SCAW sets the output pulse width for SCA 1-8. (SCA 9-16 don’t have outputs.) This setting isn’t indexed like other SCA settings; it applies to all 8 SCAs.
Errors: An INVALID PARAMETER error will be returned if the parameter is not 100 or 1000, and the width will be set to 100.
Example: SCAW=1000; // Set SCA 1-8 to produce 1000nS pulses
Command: SCOE
Parameter: [RI{SING}|FA{LLING}]
Units: none
Default: RISING
Dependencies: none
Supported: FW6.00 and later
Related: SCOT, SCOG, AUO1, DACO; ‘Arm Digital Scope’ Request Packet
Description: SCOE sets the trigger edge polarity of the internal digital oscilloscope. (Note: The internal scope uses the selected AUX_OUT1 signal as the trigger source. The scope captures 2048 samples of the signal selected by DACO. Also, the scope must be armed before a trigger can occur. See ‘Arm Digital Scope’ Request Packet.)
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of the values specified.
Example: SCOE=RISING; // Trigger the internal scope on the rising edge of
// of the trigger (selected AUX_OUT1 signal)
Command: SCOG
Parameter: [1|4|16]
Units: none
Default: 1
Dependencies: none
Supported: FW6.00 and later
Related: SCOE, SCOT, AUO1, DACO; ‘Arm Digital Scope’ Request Packet
Description: SCOG sets the gain of the internal digital oscilloscope. (SCOG does not affect the DAC output.) The signal is not clamped for gains of 4 or 16; it will roll over, so care must be taken to interpret the results accordingly. (Note: The internal scope uses the selected AUX_OUT1 signal as the trigger source. The scope captures 2048 samples of the signal selected by DACO. Also, the scope must be armed before a trigger can occur. See ‘Arm Digital Scope’ Request Packet.)
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of the values specified.
Example: SCOG=4; // Set the scope gain to 4x
Command: SCOT
Parameter: [87|50|12|-25]
Units: %
Default: 87%
Dependencies: none
Supported: FW6.00 and later
Related: SCOE, SCOG, AUO1, DACO; ‘Arm Digital Scope’ Request Packet
Description: SCOT sets the trigger position of the internal digital oscilloscope. 12%, 50% or 87% means that the trigger will be positioned at the 12%, 50% or 87% point of the digital scope data (i.e. the first 246, 1024 or 1782 samples are prior to the trigger and the rest are after the trigger.) -25% means that the trigger occurred 512 samples prior to the start of the scope data. (Note: The internal scope uses the selected AUX_OUT1 signal as the trigger source. The scope captures 2048 samples of the signal selected by DACO. Also, the scope must be armed before a trigger can occur. See ‘Arm Digital Scope’ Request Packet.)
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of the values specified.
Example: SCOT=12; // Set the trigger position to 12%
Command: SOFF
Parameter: [OF{F}|{+|-}####.###]
Units: channels
Default: OFF
Range: Depends on number of channels specified by MCAC:
256
ch: -256 to +255.992 ch; 1/128 ch precision
512 ch: -512 to
+511.984 ch; 1/64 ch precision
1024 ch: -1024 to +1023.969 ch;
1/32 ch precision
2048 ch: -2048 to +2047.937 ch; 1/16 ch
precision
4096 ch: -4096 to +4095.875 ch; 1/8 ch precision
8192
ch: -8192 to +8191.75 ch; 1/4 ch precision
Dependencies: MCAC must be sent prior to SOFF
Supported: FW6.00 and later
Related:
Description: SOFF can be used to specify the spectrum offset, if desired. Applying a positive offset will shift the spectrum up (i.e. higher in energy), while a negative offset shifts the spectrum down.
Errors: An INVALID PARAMETER error will be returned if the parameter is not within the range specified.
Example: SOFF=10.5; // Shift the spectrum up by 10.5 channels
Command: SYNC
Parameter: [IN{T}|EX{T}|FR{AME}|NO{TIMETAG}]
Units: none
Default: INT
Dependencies: none
Supported: FW6.06.05 and later
Related: CLKL
Description: SYNC selects the sync source for
List-mode:
INT: Internal sync. The List-mode timer is reset to
0 by the ‘Clear/Sync List-mode timer’ request
packet.
EXT: External sync. A rising edge on the input listed
below will reset the List-mode timer to 0. The ‘Clear/Sync
List-mode timer’ request packet also resets the timer. In this
mode, the rollover of the least-significant 16 bits of the timer will
trigger a Timetag record, as described in Section 4.2.22.
FRAME:
External sync. A rising edge on the input listed below will reset the
List-mode timer to 0, increment the Frame Count, and also trigger a
Frame+Timetag record (as described in Section 4.2.22). The
‘Clear/Sync List-mode timer’ request packet resets both
the timer and frame count to 0. In this mode, the rollover of the
least-significant 16 bits of the timer will trigger a Frame+Timetag
record.
NOTIMETAG: Internal sync. Same as ‘INT’,
above, except each event is 16 bits, not 32 bits. There is no timetag
stored with each event, only timer rollovers result in a timetag
being stored in the data stream, at 100uS or 1mS rate. See Section
6.1.
The external sync signal should be connected to the following input:
PX5/Gammarad: The AUX-1 input. ‘CON1=AUXIN1’ must be commanded;
DP5: The AUXIN2 input.
DPG: The AUX2 input. ‘CON1=AUXIN1’ must be commanded.
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of those listed.
Example: SYNC=EX; // Select external sync for List-mode
Command: TECS
Parameter: [###|OF{F}]
Units: K
Default: OFF
Range: 0-299K; ~0.1K precision
Dependencies: none
Supported: FW6.00 and later; not supported on DP5G
Description: TECS turns the PC5 TEC supply on or off, and sets the TEC temperature setpoint.
Errors: An INVALID PARAMETER error will be returned if the specified temperature is outside the range listed. A PC5 NOT PRESENT error will be returned if a PC5 is not detected.
Example: TECS=220K; // Turn on the TEC supply and cool to 220K
// or as cool as possible
Command: TFLA
Parameter: [##.###]
Units: US (microseconds)
Range: The range is determined by the selected peaking time; see the table under the TPEA command.
Default: 0uS
Dependencies: TPEA must precede TFLA
Supported: FW6.00 and later
Related: TPEA
Description: TFLA selects the flat top width of the trapezoidal shaper. A flat top of 0uS will result in a triangular shape, not trapezoidal. The commanded peaking time (TPEA) determines the precision with which the flat top width can be commanded; the DP5 will round the commanded setting to the next lowest one.
Errors: An INVALID PARAMETER error will be returned if the commanded flat top is outside the range given in the TPEA table.
Example: TFLA=10; // This selects a flat top width of 10.00uS.
Command: THFA
Parameter: [###.##] {[###] in firmware prior to FW6.05}
Units: unitless
Range: 0-255.93 [256 equates to 50% of full-scale]
Precision: 1 part in 4096
Default: 0
Dependencies: none
Supported: FW6.00 and later
Related: PURE
Description: THFA sets the threshold for the fast channel.
[Generally, the ideal fast threshold is determined empirically, or by
using the ‘Autoset Fast Threshold’ request packet (which
only works in the absence of a source.) This is discussed in detail
elsewhere.]
The units or scale factor is somewhat problematic,
because the fast channel doesn’t have a digital fine gain
control like the shaped channel does, so only changes in coarse
(analog) gain affect the fast channel. The ‘MCAS’ (MCA
Source) command can be used to route the fast channel into the MCA,
so that a spectrum of the fast channel can be inspected.
The
parameter is a multiple of 1/16. It ranges from 0/16 to 4095/16. This
awkward-seeming arrangement was done to increase the precision of the
setting, while maintaining backward compatibility to custom software,
configuration files, etc.
Errors: An INVALID PARAMETER error will be returned if the commanded threshold is outside the range given.
Example: THFA=10; // This sets the fast threshold to 10.
Command: THSL
Parameter: [##.###]
Units: % (percent of full-scale)
Range: 0-24.9% (with approx. 0.1% precision; approx. 0.01% precision for FW6.06 and later)
Default: 0
Dependencies: none
Supported: FW6.00 and later
Related: THFA, TLLD
Description: THSL sets the noise threshold for the peak detect unit. Events below this threshold will not be recorded in the spectrum; this acts as a low-level discriminator (LLD). [Use the ‘TLLD’ command in addition to ‘THSL’ if it is desirable to have the LLD reject more than just noise.]
Errors: An INVALID PARAMETER error will be returned if the commanded threshold is outside the range given.
Example: THSL=4.5; // This sets the shaped threshold to 4.5% of full scale
Command: TLLD
Parameter: [####|OF{F}]
Units: channels
Range: 256 ch: 0 - 255
512 ch: 0 – 511
1024 ch: 0
- 1023
2048 ch: 0 - 2047
4096 ch: 0 - 4095
8192 ch: 0 –
8191
Default: OFF
Dependencies: none
Supported: FW6.01 and later
Related: THSL
Description: TLLD sets the low-level discriminator (LLD) for the MCA; only events above this channel will be recorded in the spectrum. If the LLD is enabled (i.e. not OFF), then events must be above both the LLD threshold and the shaped (slow) threshold (see THSL) to be recorded.
Errors: An INVALID PARAMETER error will be returned if the parameter is outside the range 0- 8191; it is not error-checked with regard to the ranges listed.
Example: TLLD=110; // Events in channels 110 or lower are rejected
Command: TPEA
Parameter: [###.###]
Units: US (microseconds)
Range: 0.8-102.4uS (CLK=20MHz), 0.2-25.6uS (CLK=80MHz), 0.2-102.4uS (CLK=AUTO)
Default: None – this command is required.
Dependencies: CLCK (if used) must precede TPEA
Supported: FW6.00 and later
Related: TFLA
Description: TPEA selects the peaking time for the slow (shaped) channel. If CLCK=AUTO (automatic CLK selection) is commanded prior to TPEA, then TPEA will set the FPGA clock to 80MHz for peaking times of less than 5uS, and 20MHz for peaking times of 5uS or greater. The precision with which the peaking time can be programmed is listed below. [The selected peaking time also determines the range and precision of available flat top widths, so those are listed as well.] The DP5 will round the commanded peaking time to the next lowest one, so an error will only be returned if the commanded peaking time is outside the range listed above.
Errors: An INVALID PARAMETER error will be returned if the commanded peaking time is outside the range given.
Example: TPEA=10; // This selects a peaking time of 10.00uS. If
// CLCK=AUTO was commanded prior to this, then
// the FPGA clock will be set to 20MHz
|
FPGA Clock=20MHz |
FPGA Clock=80MHz |
||||||
|
Peaking Time |
Precision |
Flat Top |
Precision |
Peaking Time |
Precision |
Flat Top |
Precision |
|
0.800 - 6.40uS |
100nS |
0.05 – 3.15uS |
50nS |
0.200 - 1.600uS |
25nS |
12.5 – 787nS |
12.5nS |
|
6.60 - 12.80uS |
200nS |
0.1 – 6.30uS |
100nS |
1.650 - 3.200uS |
50nS |
25 – 1575nS |
25nS |
|
13.20 - 25.60uS |
400nS |
0.2 – 12.60uS |
200nS |
3.30 - 6.40uS |
100nS |
50 – 3150nS |
50nS |
|
26.40 - 51.20uS |
800nS |
0.4 – 25.2uS |
400nS |
6.60 - 12.80uS |
200nS |
0.1 – 6.30uS |
100nS |
|
52.80 - 102.4uS |
1600nS |
0.8 – 50.4uS |
800nS |
13.20 - 25.60uS |
400nS |
0.2 – 12.6uS |
200nS |
Command: TPFA
Parameter: [50100|200|400|1600]
Units: NS (nanoseconds)
Range: 50, 100 or 400nS for 80MHz FPGA clock; 200, 400 or 1600 for 20MHz FPGA clock.
Default: 100 for 80MHz clock; 400 for 20MHz clock
Dependencies: TPEA must precede TPFA
Supported: FW6.00 and later (50 & 200 settings require FW6.01 or later)
Related: THFA
Description: TPFA selects the peaking time for the fast channel. There are three settings available for each FPGA clock rate; only 400nS is available at both FPGA clock rates.
Errors: An INVALID PARAMETER error will be returned if the parameter violates the conditions listed under Range.
Example: TPFA=400; // This selects a fast channel peaking time of 400nS,
// regardless of the FPGA clock.
Command: TPMO
Parameter: [OF{F}|+S{NG}|+D{BL}| -S{NG}|-D{BL}]
Units: none
Default: OFF
Dependencies: none
Supported: FW6.00 and later
Related: DACF
Description: TPMO selects whether the Test Pulser is enabled,
and if so, what type of pulses it produces. The test pulser uses the
DAC output to simulate the output from a reset-style preamplifier. It
produces a step in the DAC output at a rate of 2kHz. This signal is
intended to be connected directly to the DP5 signal input for test
and diagnostic purposes.
If +SNG or –SNG is specified,
the DAC step is 1/4 of the value specified by the DACF command. (i.e.
for DACF=200MV, “+SNG” produces +50mV steps and “-SNG”
produces -50mV steps.) If +DBL or –DBL is specified, two step
sizes are produced alternately; one is ¼ the value specified
DACF, the other is 1/16 the value. (i.e. for DACF=200MV, “+DBL”
produces +50mV and +12.5mV steps alternately; “-DBL”
produces -50mV and -12.5mV steps alternately.)
For really
large steps, a negative DACF can be used. This is treated as an
unsigned value; to calculate the resulting step size from a negative
DACF setting, use 1V+(DACF parameter). For example, for DACF=-200MV,
+SNG produces ¼ (1V + -200mV) = 200mV steps.
Detector
Reset Lockout (RESL) should be disabled or set to a short interval
when the test pulser is enabled, since a detector reset is simulated
when the DAC output wraps around. (It produces a large pulse of the
polarity opposite the desired pulses, which looks like a detector
reset.)
Note that if the Test Pulser is enabled, the internal
digital scope will still capture the signal specified by DACO, even
though the DAC will output test pulses.
Note: The PX5 has
internal switches to connect the test pulser to the analog input. The
DP5 does not; connect a test lead from J4 pin 1 to J8 pin 1 to use
the test pulser.
Errors: An INVALID PARAMETER error will be returned if the parameter is not one of the values specified.
Example: TPMO=+SNG; // Enable the test pulser to produce single
// positive-going steps
Command: VOLU
Parameter: [ON|OF{F}]
Range: ON or OF{F}
Default: OFF
Dependencies: none
Supported: FW6.01 and later; PX5 only, not supported by DP5 or DP5G, which don’t have speakers
Description: This turns the PX5 speaker on or off. This simulates a Geiger counter, and produces a click for each event recorded by the fast channel.
Errors: An INVALID PARAMETER error will be returned if the parameter is not ON or OF{F}.
Example: VOLU=ON; // Enable the PX5 speaker
List-mode refers to a data set that contains amplitude and timing information about each event, as opposed to a spectrum.When an event is detected by the DP5, if it passes all the acceptance criteria, then it is added into the spectrum. Its amplitude (channel number) and time are also recorded in the List-mode FIFO. Periodically, the List-mode timer least-significant bits roll over, and this triggers the writing of the most-significant bits of the timer into the FIFO. (This reduces the data requirements, by not writing the entire 47-bit time tag for every event.)
The count rate that List-mode can support is dependent on the interface used, and how fast the application is able to transfer data. Theoretically, the USB implementation can sustain roughly 150,000 counts per second, but this requires an application that can reliably perform data requests every 5mS, or perhaps faster. (The VB Demo uses a multimedia timer to request data every 5mS, and it is able to sustain about 100,000 counts per second. But it’s easy to cause data dropouts due to the architecture of Visual Basic.)
There is also a 16-bit mode of operation. In this mode, no timetag is stored with each event, to further reduce the data requirement. The timetag is inserted into the datastream at either a 1kHz or 10kHz rate. This leads to a significant amount of data being generated at low count rates (32kbps/320kbps with no input counts), but it produces less at high count rates. This mode allows a maximum count rate of roughly 240,000 counts per second. Also, in the 16-bit mode, no events or timetags are recorded while MCA Enable is inactive, or GATE is enabled but de-asserted.
Ethernet can sustain around 12,000 counts per second. Ethernet is not well suited to List-mode because collisions can occur, causing retransmissions, which interfere with the periodic data transfer. (A quiet network is a necessity.)
RS232 can sustain around 2,000 counts per second at 115kbaud.
The List-mode timer is free-running, and cannot be stopped. It can be reset by sending a Request Packet to the DP5, or via a hardware signal.
List-mode data acquisition runs simultaneous to a spectrum acquisition. When the MCA is paused (via the ‘MCA Enable’ command, or briefly during spectrum readout), the List-mode data taking is also paused. (The List-mode timer continues to run.) Everything that qualifies whether an event is accepted into the spectrum also qualifies whether it is accepted into the List-mode buffer. This includes thresholds (slow and LLD), PUR, RTD, GATE, presets, and reset lockout, depending on how these are configured.
There are only two List-mode configuration options: CLKL (see section 5.1.11), and SYNC (see section 5.1.59). In normal List-mode operation, CLKL selects whether the List-mode timer operates at 1MHz (1uS per tick), or 10MHz (100nS per tick). In 16-bit mode (SYNC=NOTIMETAG), CLKL selects whether the timetags occur in the data stream at 10kHz (100uS) or 1kHz (1mS). SYNC selects whether an external signal is used to synchronize the List-mode timer, and, if so, also selects between two alternate data formats. SYNC is also used to select the 16-bit mode, in which case external sync is not available.
There are several request packets used for managing List-mode operation: ‘Clear Spectrum’ (see section 4.1.17) also clears the List-mode FIFO; and ‘Clear/Sync List-mode timer’ clears the List-mode timer, and triggers a timer rollover (see section 4.1.35).
The ‘Request List-Mode Data’ Request Packet (section 4.1.10) will result in a List-mode Data Response Packet (section 4.2.22) being sent. The List-mode Data Packet uses two different PIDs to indicate the state of the List-mode FIFO (full/not full). When the List-mode data packet indicates that the FIFO is full, that means that events were lost. When the FIFO is full, subsequent events are lost, rather than the initial ones. The FIFO is 4096 bytes in size, which means it can hold a combination of 1024 events and timetags. (Each record is 32 bits in size, as described in section.4.2.22.)
With the Streaming mode enabled, the SCA signals are reconfigured into an 8-bit bus, and the amplitude of each valid event is written out in two bytes. The AUX_OUT2 signal is used as a strobe; the data changes on the rising edge, and should be latched on the falling edge. SCA8 is an LSB/MSB indicator: when low, the remaining 7 bits (SCA7-1) are the least-significant bits of the 14-bit amplitude. When SCA8 is high, SCA7-1 are the most-significant bits of the 14-bit amplitude.
The oscilloscope capture below shows the relative timing of the signals. The trace on the bottom is the strobe, as output via CON2 (connector 2) on a PX5. The top trace shows the timing of the SCA data lines; they change state coincident with the rising edge of the strobe.
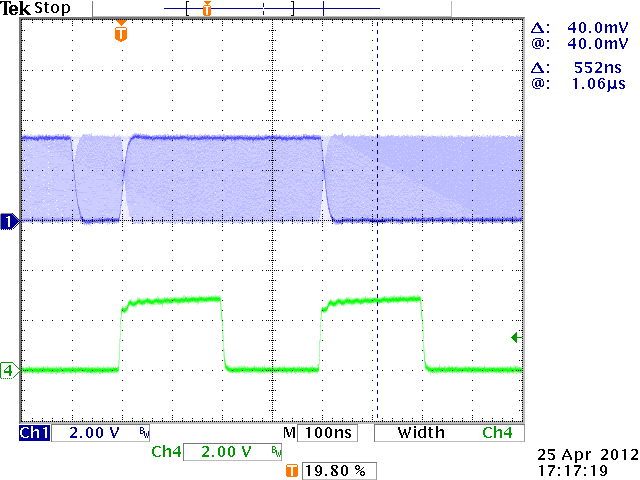
The timing shown is with the clock set to 20MHz. The strobe high and low times are 200nS, as is the minimum idle time between events (i.e. the strobe low time after the 2nd strobe, and before the 1st strobe of the next event.) In reality, this idle time is governed by the peaking time – the minimum peaking time @ 20MHz is 800nS, and therefore the minimum idle time at 20MHz is approximately 800nS. The actual idle time is governed by the configured peaking time.
With the clock set to 80MHz, the signals are 4x faster – the strobe high and low times become 50nS. The minimum peaking time @ 80MHz is 50nS, so the minimum idle time between events is also 50nS.
The streaming mode uses SCA8 internally as the event source, so SCA8 must be enabled for streaming to operate. The SCA8 thresholds default to the entire spectrum, but they can be adjusted to focus on a ROI, remove the top or bottom of the spectrum, etc.
The events output in streaming mode are those that are accepted by SCA8. They are conditioned by the slow threshold, the SCA8 thresholds, PUR (if enabled), RTD (if enabled), detector reset (if enabled), and GATE (if enabled). The presets (acquisition time, real time, counts) do not affect SCAs (and therefore the streaming mode), nor does the LLD setting.
The streaming mode is enabled by sending the ASCII commands ‘AUO2=STREAM;’ and ‘SCAI=8;’. [Setting the SCA index to 8 enables SCA8.] Additionally, on the PX5 or DP5G, the command ‘CON2= AUXOUT2;’ is needed to route the streaming strobe to connector 2.
Amptek Inc. Page